通用工具
画出电机位置、速度、电流曲线
cd share/xyz_mobile_robot_control/pyRocky/
python listen_thread_rockyone.py
#运行出错,则安装依赖
python -m pip install dearpygui==1.3.0
脚本说明:
前四个电机为底盘直行电机,曲线为电机速度指令和电机速度反馈值、电流曲线
后四个电机为底盘转向电机,曲线为电机位置指令和电机位置反馈值、电流曲线
第九个电机为底托电机, 画出的曲线为底托电机位置指令和位置反馈、电流反馈和速度反馈
空格键可按下暂停
测试和生产修改底盘配置的方法
使用配置软件,快速修改底盘配置。
cd share/xyz_mobile_robot_control/rocky_setup/ python rocky_setup.py # 运行出错,则安装依赖 python -m pip install PyQt5
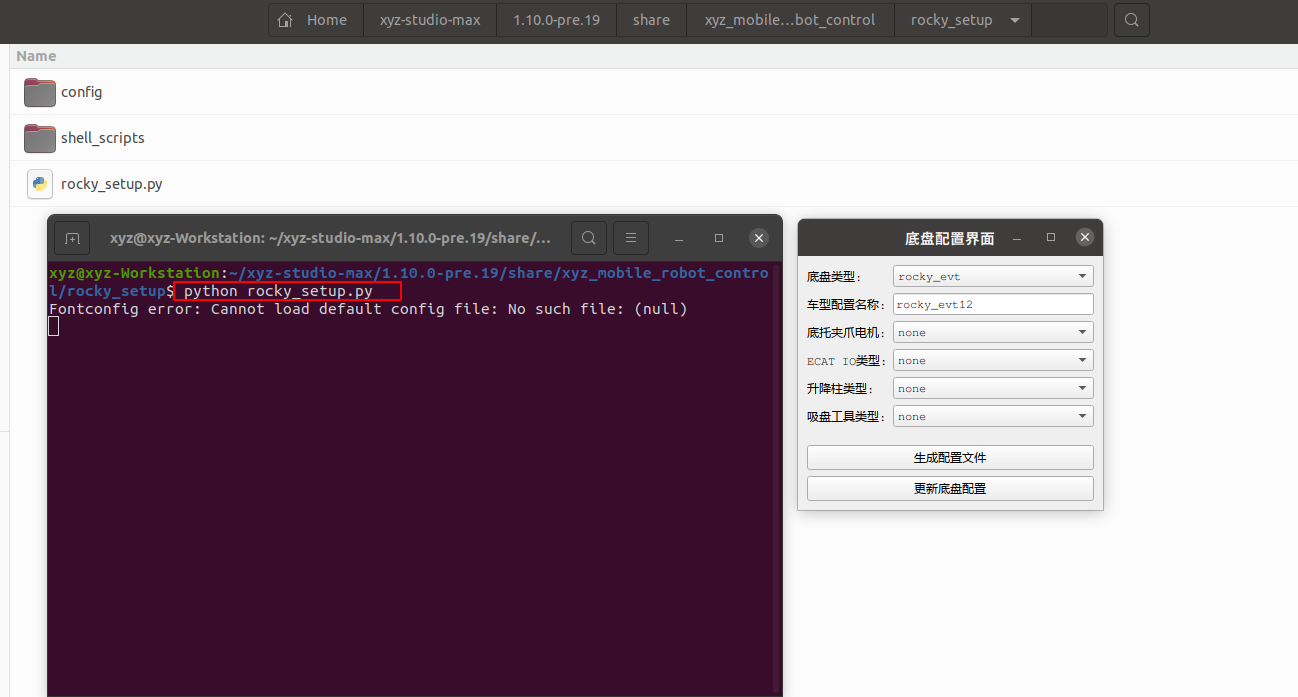
根据实际车型,是否有底托等设备,进行选择。
点击
生成配置文件,生成对应的 yaml 文件。点击
更新底盘配置,将配置文件写入到底盘。
检查 ethercat 设备是否在线
cd share/xyz_mobile_robot_control/pyRocky/ python ethercat_slaves.py对于常见的底盘, ethercat 设备顺序如下:
直行电机0,
直行电机1,
直行电机2,
直行电机3,
转向电机0,
转向电机1,
转向电机2,
转向电机3,
底托电机0,
立柱电机
吸盘0
吸盘1