连接机械臂
前提条件
连接机械臂前,需完成以下设置:
通信设置,根据实际情况确定是否关闭防火墙,若允许关闭防火墙则按下面方法一设置,若不允许关闭防火墙则按方法二设置。
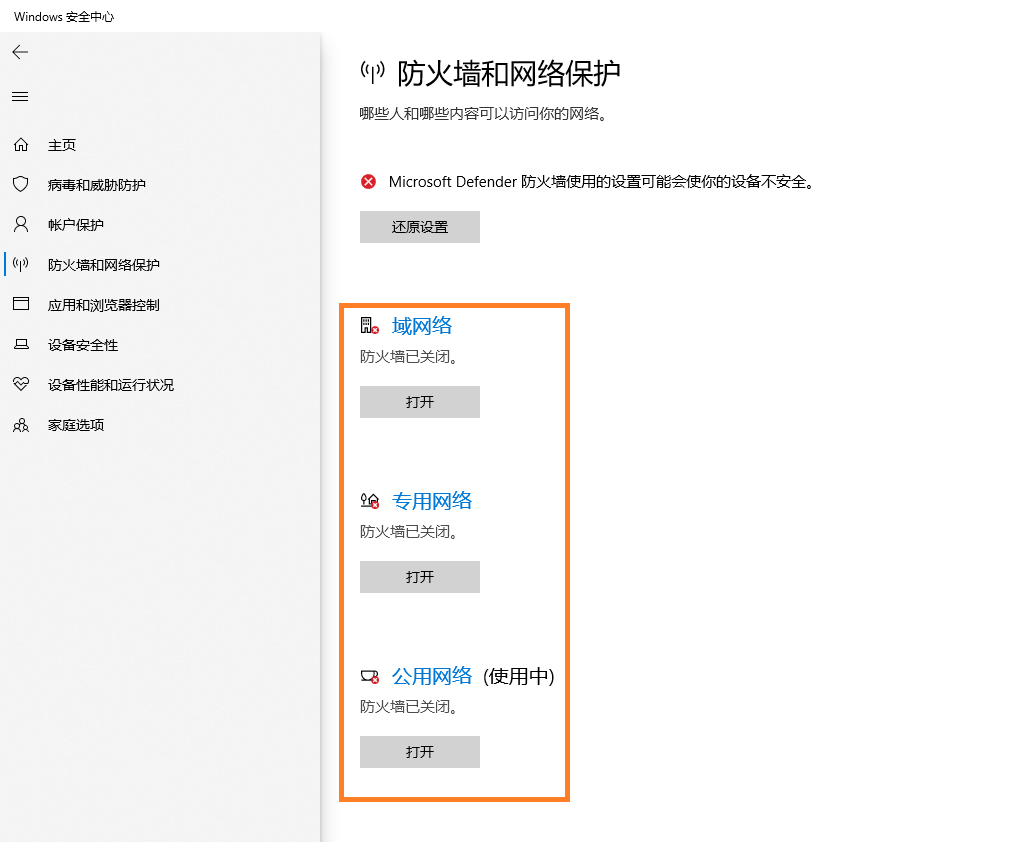
方法一(允许关闭防火墙):打开 “Windows安全中心 > 防火墙和网络保护” 窗口,并查看 域网络、专用网络、公用网络 的防火墙是否打开。若已打开,则需要全部关闭。(也可直接在Windows系统左下角搜索栏搜索并打开“防火墙和网络保护”。)
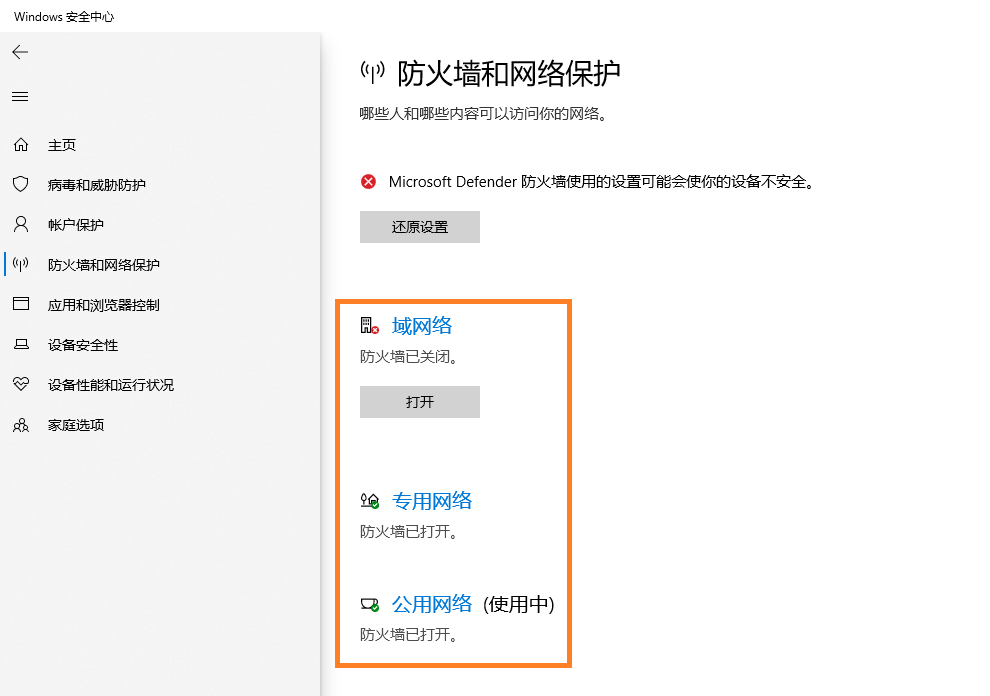
方法二(不允许关闭防火墙):首先打开 “Windows安全中心 > 防火墙和网络保护” 窗口,关闭 域网络 防火墙,并打开 专用网络 和 公用网络 的防火墙。
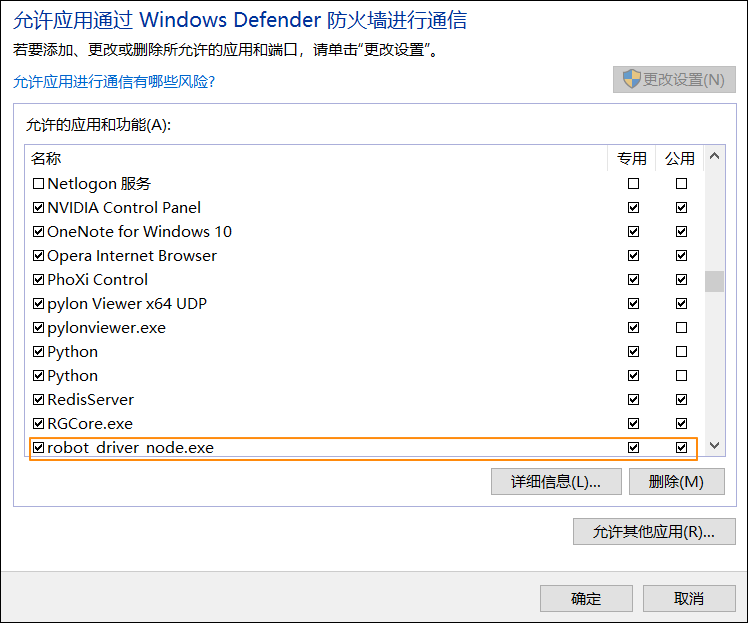
然后在 “控制面板 > 所有控制面板项 > Windows Defender 防火墙” 中查看Windows Defender 防火墙是否启用。若未启用,则需要先启用防火墙。若已启用,则在左侧菜单栏单击 “允许应用通过 Windows Defender 防火墙”,查看robot_driver_node.exe的 专用 和 公用 是否均已勾选。(若robot_driver_node.exe不在列表中,则单击 允许其他应用,将 “Max安装目录\bin” 文件夹下的 robot_driver_node.exe 添加到 允许的应用和功能 列表中。)
机械臂设置,在 运动 页签下添加并加载对应型号的机械臂urdf模型,具体操作请参见 添加机械臂。
操作步骤
在Max顶部工具栏,选择 “工具 > 进程管理”,查看进程状态。
robot_driver_node:工控机主控驱动程序。在工控机主控模式下,由工控机根据任务主动下发各类指令给机械臂/PLC等设备让其执行。
robot_server:机械臂主控驱动程序。在机械臂主控模式下,由机械臂(包含PLC等设备)根据任务主动发送各类指令给工控机获取信息。
两者的定义和使用场景可以参考 机械臂主控(Robot Master),工控机主控(IPC Master)。
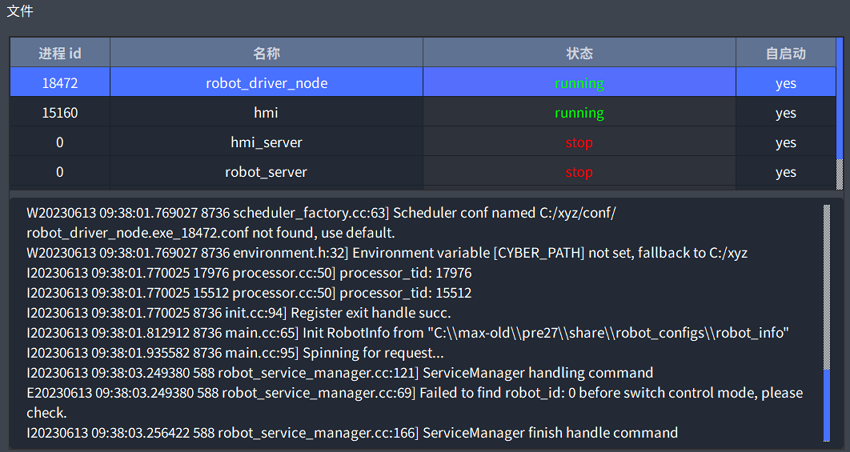
如果robot_driver_node进程处于停止状态,右键单击进程,选择 启动进程,确保下方日志无报错。
如果需要使用机械臂主控模式,则需要启动 robot_server 进程。
提示
右键单击进程,可启动、关闭、删除进程,并设置配置文件路径等运行参数。robot_driver_node和robot_server对应的配置文件分别为“项目文件夹\robot_configs”下的robot_config.yaml和robot_server_config.yml。
在机械臂上完成准备工作,请参考 安装机械臂驱动。
单击Max软件界面右上角 虚拟示教器,单击 连接机械臂。仿真运行时,选择 仅连接到虚拟机械臂,然后单击右上角 连接虚拟机械臂。
