底盘
底盘连接不上
1. 检查急停
松开所有 急停按钮。
松开按钮后,需要使用HMI平板的
一键重连。查看 max 的连接提示,根据连接提示操作。检查电机驱动器是否上电。
手动检查 PLC(192.168.4.105) 所有急停信号是否有误。例如,PLC 158 状态应该是1表示没急停,如果松开急停状态仍未0,联系电气同事。

2. 检查是否与底盘通信是否正常
# 目前底盘 ip 为 192.168.4.10, 或 6.10 ping 192.168.4.10 ping 192.168.6.10如果 ping 不通
检查底盘是否正常开机
检查上位机 ip 是否设置正确, 应为 192.168.4.50 或 192.168.6.50
检查底盘网线是否插好
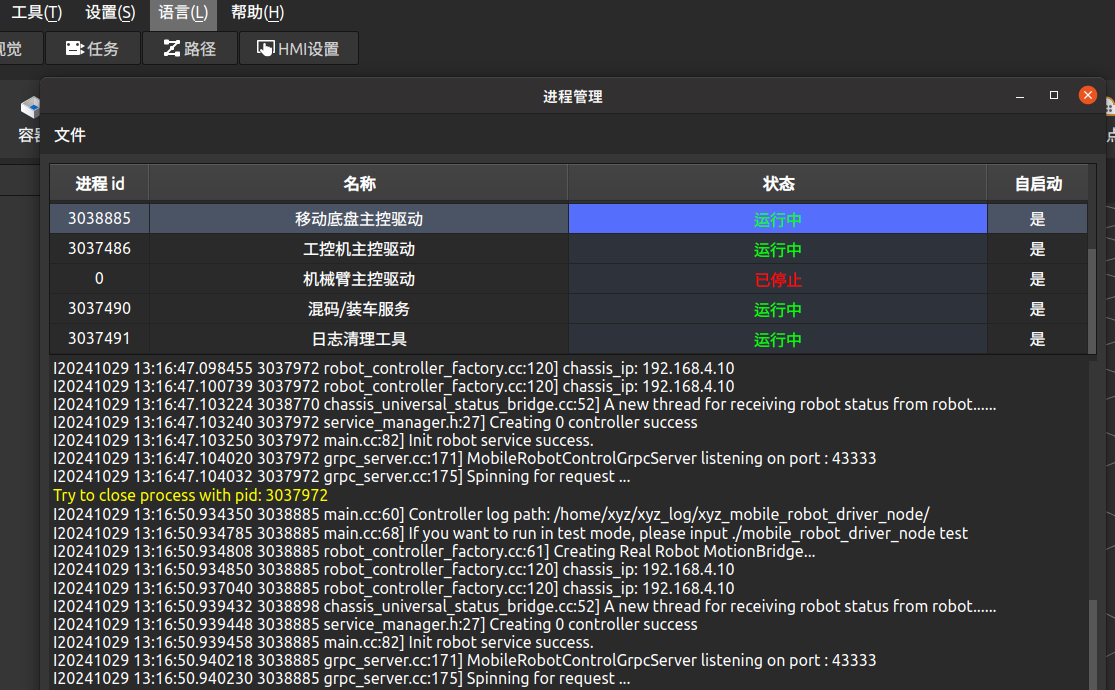
3. 检查底盘上位机驱动是否正常。
打开 MAX
工具->进程管理,查看日志信息。 或者去~/xyz_log/xyz_mobile_robot_driver_node查看完整日志。特别注意: not enabled 意思是电机没有上电。
4. 检查创博控制器是否能连接电机驱动器
# 查看底盘驱动是否正常 cd max/share/xyz_mobile_robot_control/pyRocky python ethercat_slaves.py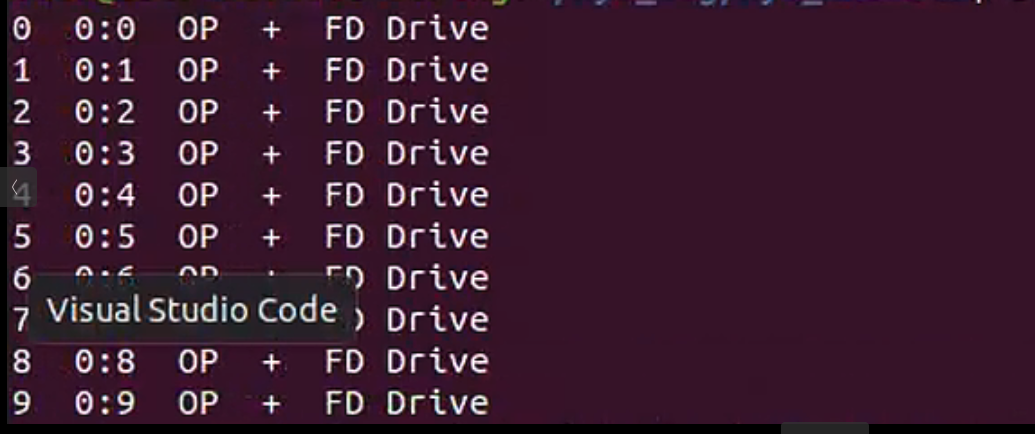
正常情况下,全是OP状态。如果找不到或者多个驱动器不是OP状态,表示底盘驱动异常。
理论上底盘电机应该识别到8个以上的驱动器,如果没有识别到,则直接拔控制器上的 ethercat 网线到某个电机驱动器上,排查是控制器问题、驱动器问题、线路问题。
如果能定位到哪一个电机,请联系电气同事,安排拆开车身外壳,找到对应的驱动器。
5. 检查电机错误码
在上位机驱动、下位机驱动日志里找到 error_code。
上位机驱动日志路径: ~/xyz_log/xyz_mobile_robot_driver_node
下位机驱动日志路径: ~/xyz_log/xyz_chassis/
- 快速拷贝日志到工控机, 进入到 share/xyz_mobile_robot_control/pyRocky/,
bash cp_chassis_log.bash
系统日志,控制器下位机 /var/log 里有 kern.log,kern.log.* 。如果 ethercat 设备突然下线,系统日志会有一些信息。
通过HMI一键重连进行重启尝试清错。
如果不可清错,请联系底盘控制同事。
另外,请确认上下位机版本一致,刷MAX对应的底盘版本。如果底盘重启了,也需要在进程管理手动重启底盘主控驱动。
- 特别:
- 常见电机错误码解决方法
针对xyz常见问题,提供解决方法。
rocky evt 底盘电机:步科电机
rocky one 底盘电机:清能电机
rocky light 底盘电机:鸣志电机
如有出入,请联系底盘控制同事补充修改。
6. 因底盘 yaml 文件缺失导致底盘无法连接
多见于新车或更换硬件,原因是旧版本底盘固件没有对应的yaml。 如何确认:
# 查看底盘驱动是否正常 ssh user@192.168.4.10 ssh user@192.168.6.10 sudo systemctl status DRNile.service
- 如果像下面的图片,则是因为yaml文件缺失
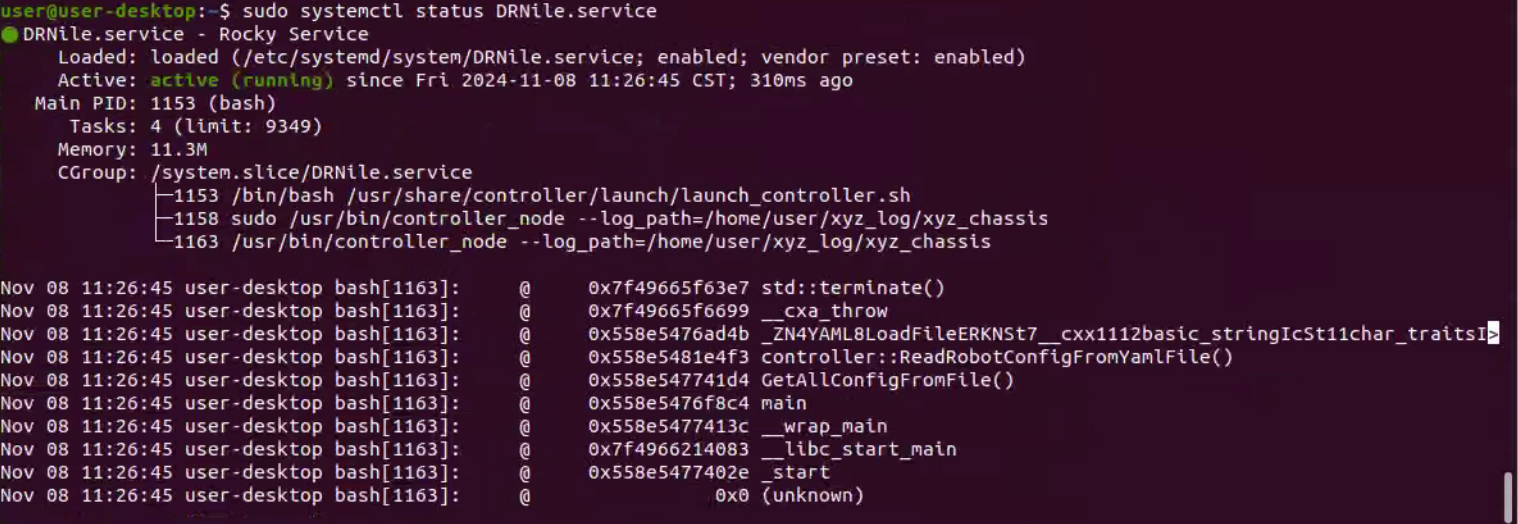
如何修改底盘配置::
sudo systemctl show-environment 查看 base_type=* 配置的车型, 然后进到 /usr/share/controller/config/, sudo vim ~/xyz_log/xyz_chassis/controller_node.INFO 修改对应的yaml sudo vim config/suction_smc_d01.yaml sudo systemctl restart DRNile.service 比如 suction_tool_type 改为 xyz, xyz-analog