夹具
查看夹具错误码
夹爪挂在底盘上
# ip 以设备管理,底盘配置的ip为准 ssh user@192.168.6.10 cd ~/xyz_log/xyz_chassis/
夹爪挂在机械臂上
# ip 以机械臂连接处的ip为准 ssh user@192.168.4.10 cd ~/Desktop/robot_arm_controller/log/
找到对应时间的日志,查看 gripper 电机当时的报错信息。
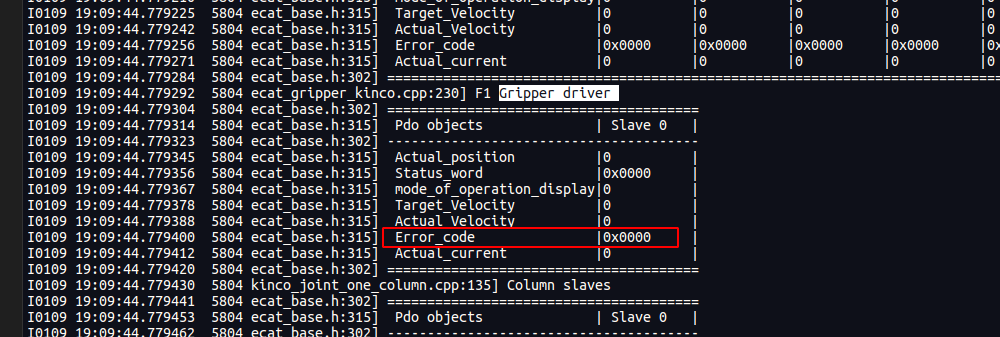
夹具错误码 0x7320
意味着编码器线松动或者被拔插。
解决方法:
1. 驱动器清错
控制器软件清错 (优先尝试)
前提:控制器可以连接到步科夹爪驱动器。
按下面指令逐项输入,可能有的指令不返回,直接 Ctrl + C 退出, 接着输入下一个指令。
如果是EVT3 和之后机型,以创博为下位机,使用如下指令。指令写入后,需要查询是否写入成功。 # 在创博下位机内部, 需要知道底盘 ip ssh user@192.168.4.10 ssh user@192.168.6.10 sudo systemctl stop DRNile.service sudo systemctl restart DRNile.service # 电机 index 8,是第 9 个电机夹爪电机,地址 0x2690,写入 10 sudo ethercat download -p 8 -t uint8 0x2690 0x00 10 # 查询是否写入成功,地址 0x2690,读取 10 sudo ethercat upload -p 8 -t uint8 0x2690 0x00 sudo ethercat download -p 8 -t uint16 0x6040 0x00 0x86 sudo ethercat upload -p 8 -t uint16 0x6040 0x00 sudo ethercat download -p 8 -t uint16 0x6040 0x00 0x06 sudo ethercat upload -p 8 -t uint16 0x6040 0x00 sudo systemctl start DRNile.service 如果是RockyOne或者EVT1 / EVT2,以树莓派为下位机,使用如下指令。只需要把ethercat 改为 ethercattool。 # 在树莓派下位机内部,例如 sudo systemctl stop DRNile.service sudo ethercattool download -p 8 -t uint8 0x2690 0x00 10 # 进程会卡死,重启树莓派 sudo reboot步科调试软件清错
下载安装步科伺服调试软件 KincoServo+ KincoServo+软件介绍-Kinco步科(https://class.kinco.cn/articledetail/51.html)
- 如下图所示,刷新后,连接。
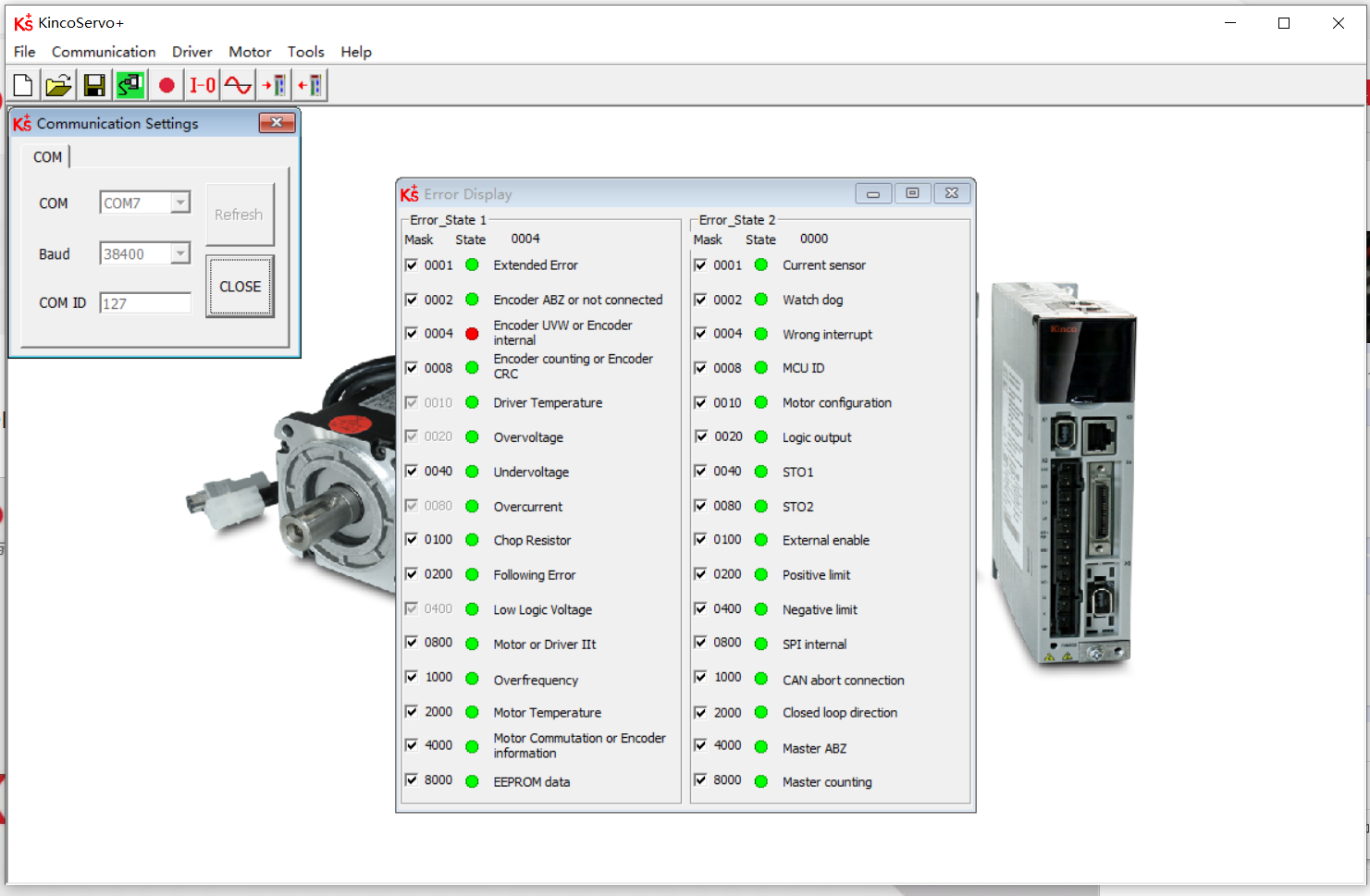
如果发现错误:
在
Encoder_Data_Reset设为 10。然后将
Controlword先设置为0086,待错误清除之后恢复为0006。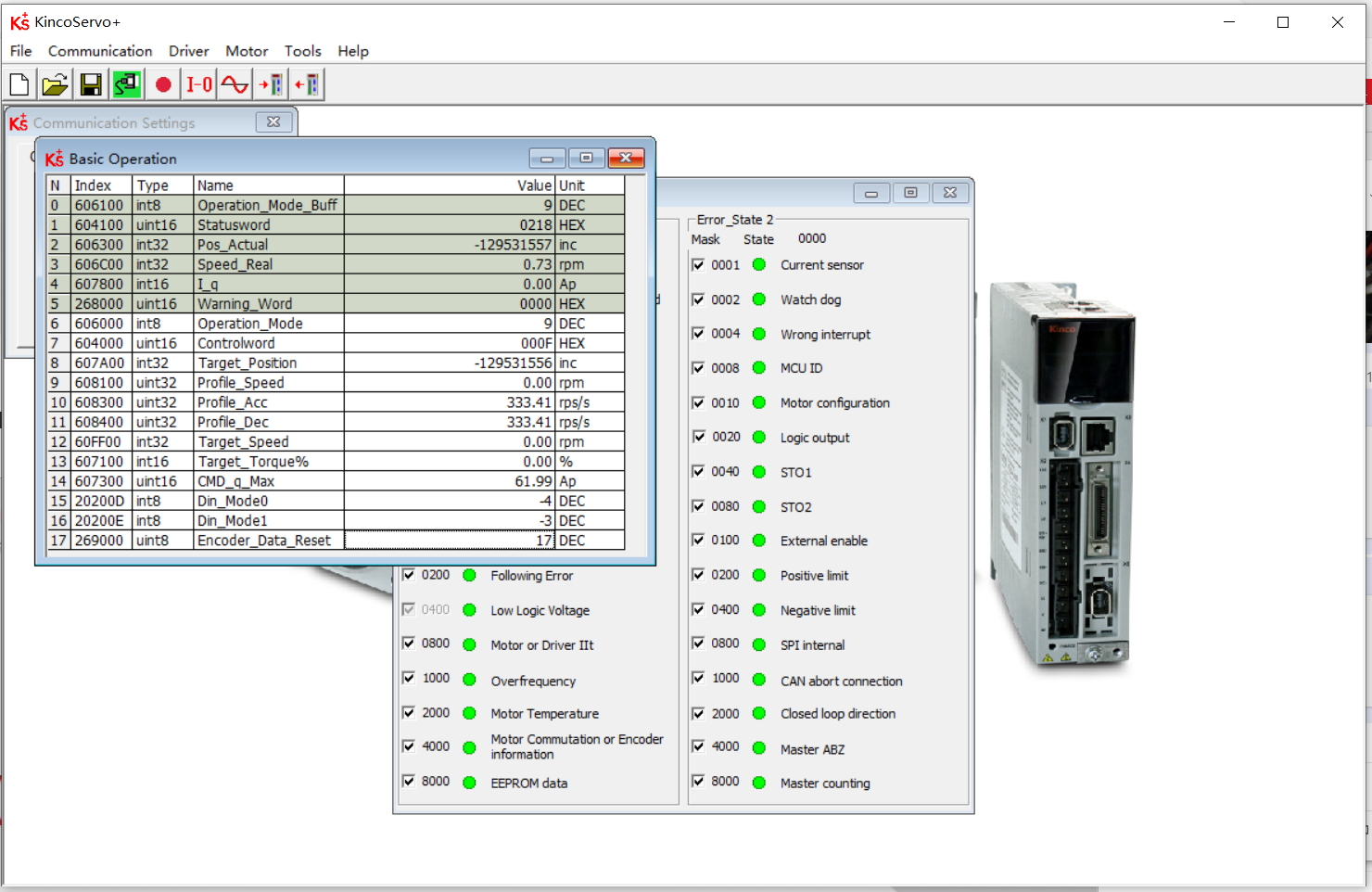
2. 使用平板的 一键重连
3. 屏蔽 7320 错误
可能是编码器是绝对编码器,可以通过编码器修改为相对编码器,避免出现此问题。
# ssh 到控制器,将 7320 错误屏蔽,将编码器改为相对编码器。 ssh user@192.168.4.10 ssh user@192.168.6.10 sudo ethercat download -p 8 -t uint8 0x2340 0x0e 1 //指令设置 sudo ethercat download -p 8 -t uint8 0x2FF0 0x01 1 //保存配置到EEPROM
4. 在平板上重新标零
在每次整车上下电后,都需要重新标零。
夹具错误码 0x7331
可能是 ethercat 传输异常,大概率是与夹爪控制器的网线质量不行。
首先,参考夹具错误码
0x7320,进行指令清错。如果清错后,还是不行,则需要更换为更高质量的网线。
标定失败后报 0x8611
电机报错 0x8611,实际跟随误差超过允许,常出现在生产验证环境。当钳工没有把抱死锁紧,标定时电机空转,就会报这个错误
解决方案
工作模式切换为6 Homing Mode。
控制字依次输入86,清错0x8611。
控制字依次输入6、F、1F将当前位置设置为零点。
长时间下电后,夹具标定和移动均失败
在长时间下电(拍急停或者是整机下电两小时以上),夹具标定和移动均失。
- 解决方法:
先尝试一键重置后,测试底托标定、和伸出、缩回。
如果不行,则整车上下电。
测试夹具标定、和伸出、缩回。
夹具固件重刷
拿到对应的 cdi 文件,使用步科调试软件进行固件重刷。
连接步科调试软件,先进行串口连接。
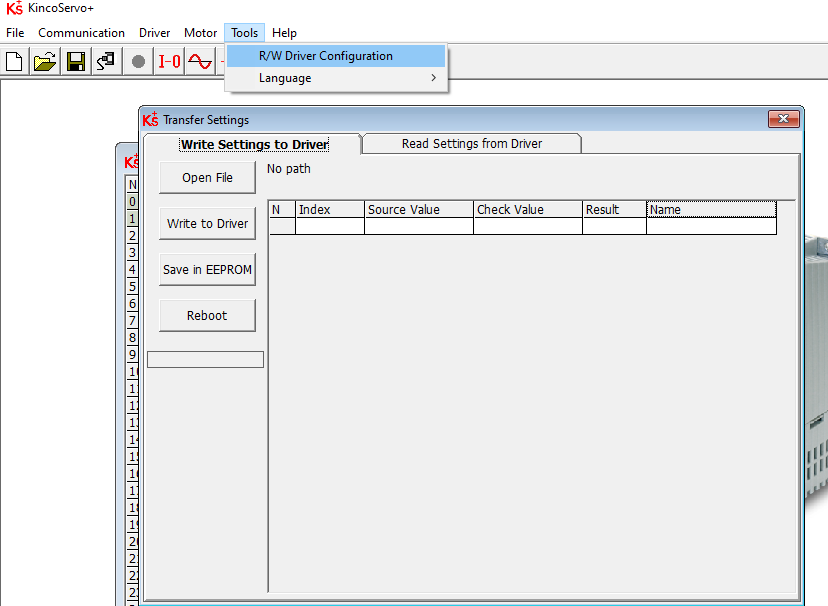
打开
Tools->R/W Driver Configuration, 切换到Write Settings to Driver选项卡。`Open File选择拿到的 cdi 文件。点击
Write to Driver。点击
Save in EEPROM.点击
Reboot。