常见问题
程序运行过后,再次运行程序时,机械臂后台程序未完全归位导致无法正常连接。
InoRobotLab 或示教器需要进行如下操作:
查看 background.pro 是否卡在某一行。
如果使用 InoRobotLab 出现此情况,则重复切换右侧控制面板的模式为
示教,看到调试页中的同步到控制器为可点击状态时,点击同步到控制器,再运行程序;或者在示教器上
示教->工程配置处,将此任务由静态任务切换为动态任务,再切换回静态任务,确认background.pro 代码已经同步到控制器。如果没有卡住,开始工控机主控的连接。
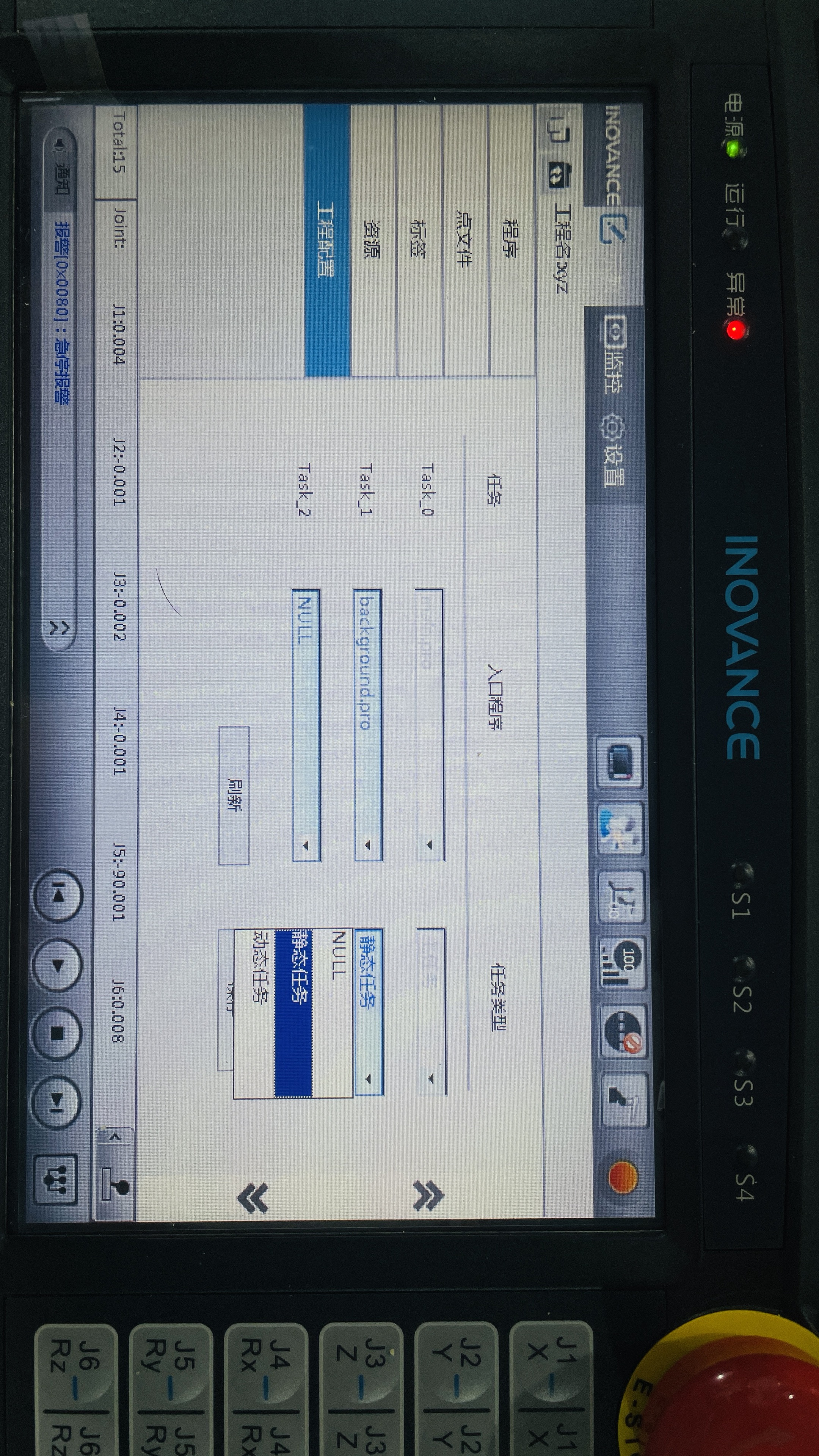
示教器切换任务
若程序导入示教器,出现大量报错,尤其是在函数定义或者函数调用处出错,可能是控制器版本太低
解决方法:联系汇川售后,升级控制器版本为 S03.21R15 或更高版本.