安装驱动
Efort 机械臂驱动文件列表
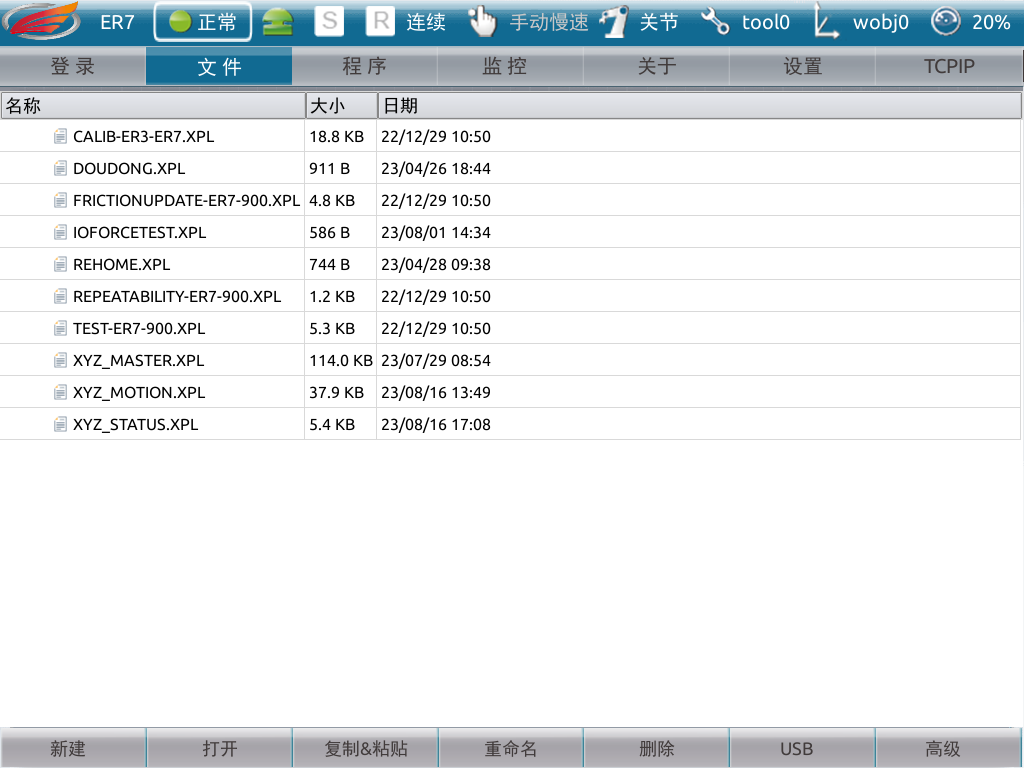
Efort的驱动文件如下所示:
XYZ_MASTER.XPL 机械臂主控程序
XYZ_MOTION.XPL 工控机主控Motion程序
XYZ_STATUS.XPL 工控机主控Status程序
需要注意的是,XPL 文件是以 XML 格式记录的程序,直接打开查看会难以阅读,需要通过Efort的仿真软件 virtualSystem_V3.3.0.1 或者导入示教器才容易阅读。
设定机械臂 IP
机械臂开机后到登录界面,输入管理员登录密码然后点击登录
EFORT 机器人提供操作员、工程师、管理员三个权限等级的账号,默认登录账号为操作者。 可以进行账号切换:在密码弹窗中输入对应权限等级的密码,然后点击
登录按钮,即可登录相应账号。 各权限等级的密码如下:
管理员: 999999
工程师: 666666
操作者: 111111
登录后,按下示教器上的 HOME 按键,进入到桌面
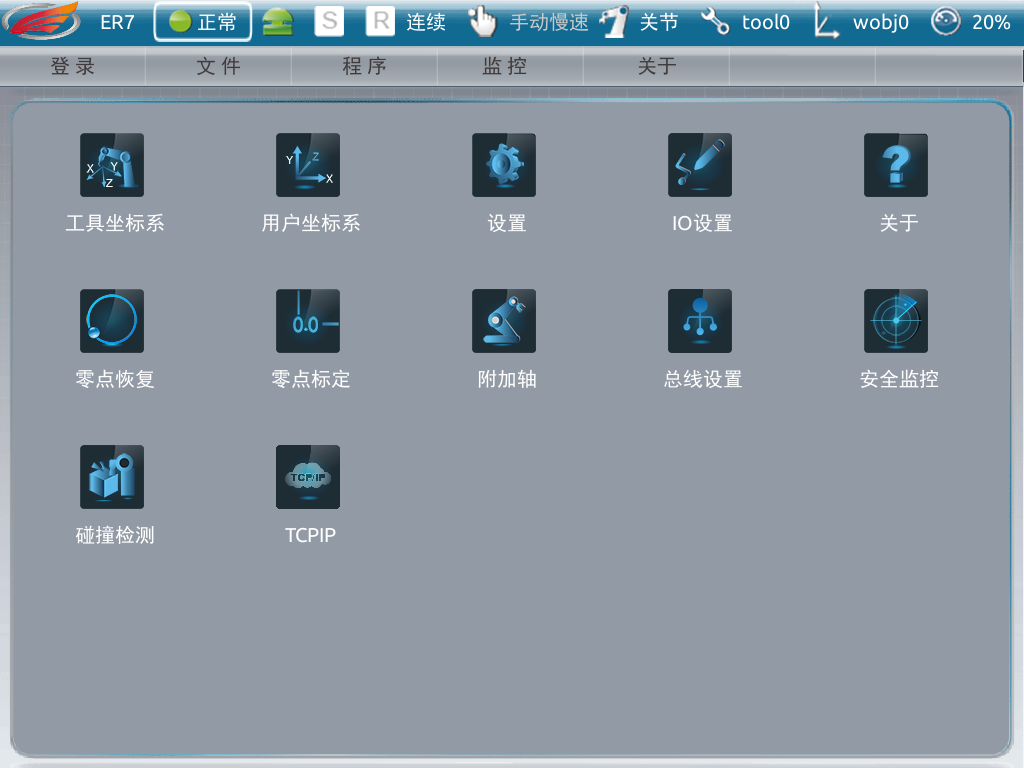
在桌面上点击
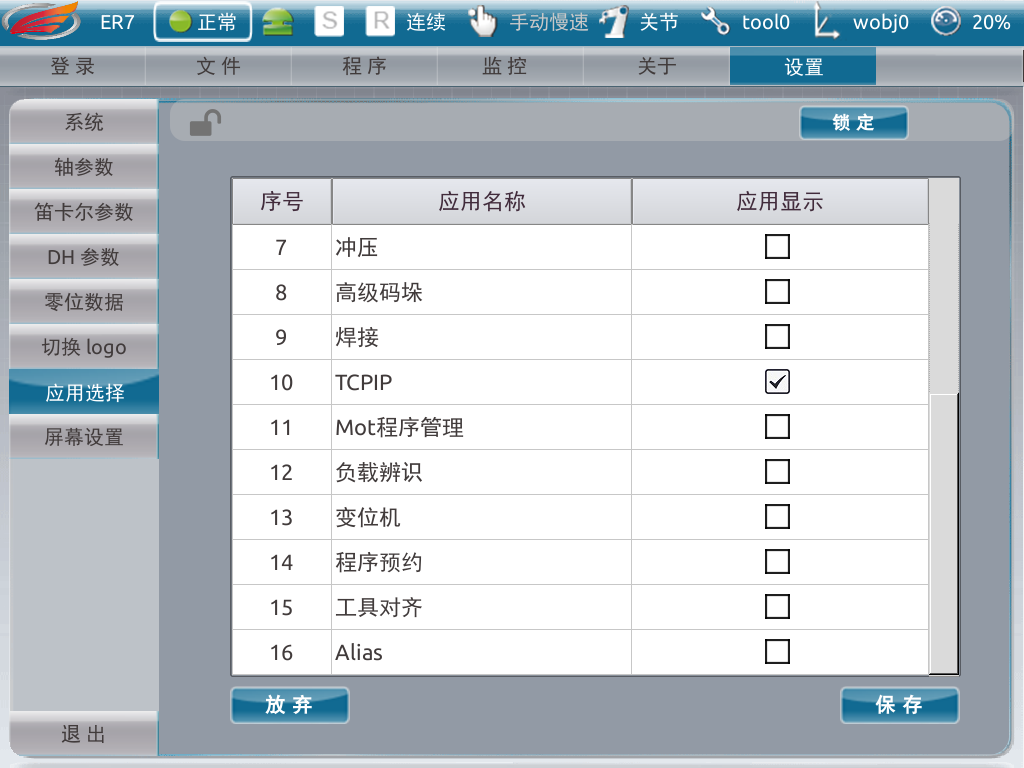
设置图标,进入设置界面

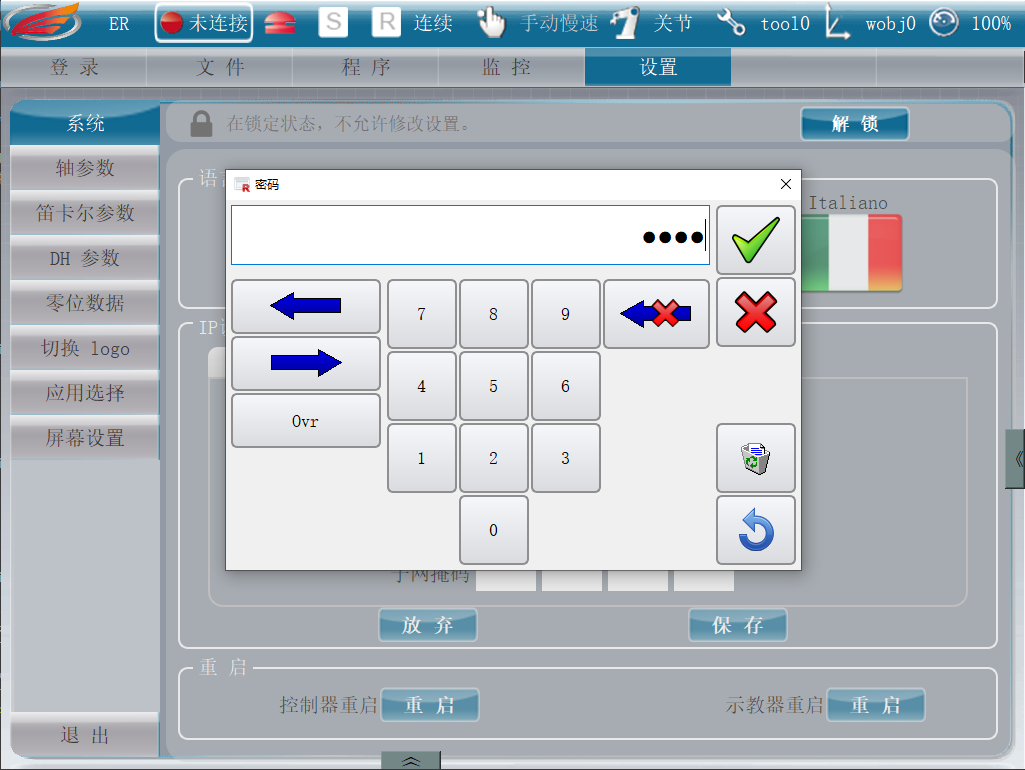
进入设置界面后点击右上角的
解锁按钮,然后输入密码: 1975 ,进行解锁
设置 ETH3 的 ip
控制器IP: 192.168.37.100
示教器IP: 192.168.37.102
网关: 192.168.37.1
子网隐码: 255.255.255.0

网络设置完成后重启机械臂生效。
配置 SOCKET 通信
机械臂开机后会到登录界面,输入管理员登录密码然后点击登录
登录后,按下示教器上的 HOME 按键,进入到桌面
在桌面找到
TCPIP图标,并点击图标进入到 TCPIP 设置界面
进入
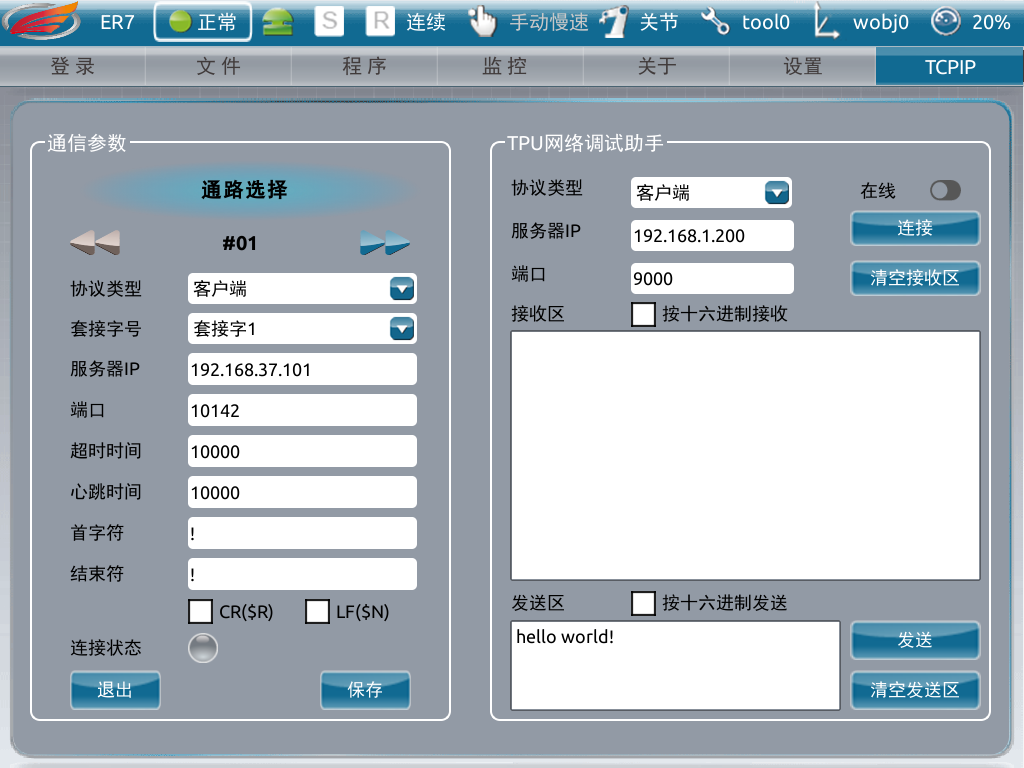
TCPIP,在通路选择里通过左右切换选择#01然后进行如下设置,设置完成后点击
协议类型: 客户端
服务器 IP : 192.168.37.101 ( 工控机 IP )
端口: 10142 (10142 是工控机主控所使用的端口号,如果是机械臂主控请修改端口为 11111)
超时时间: 1 (1 是工控机主控的超时时间,如果是机械臂主控请修改超时时间为 10000)
心跳时间: 10000
首字符: !
尾字符: !
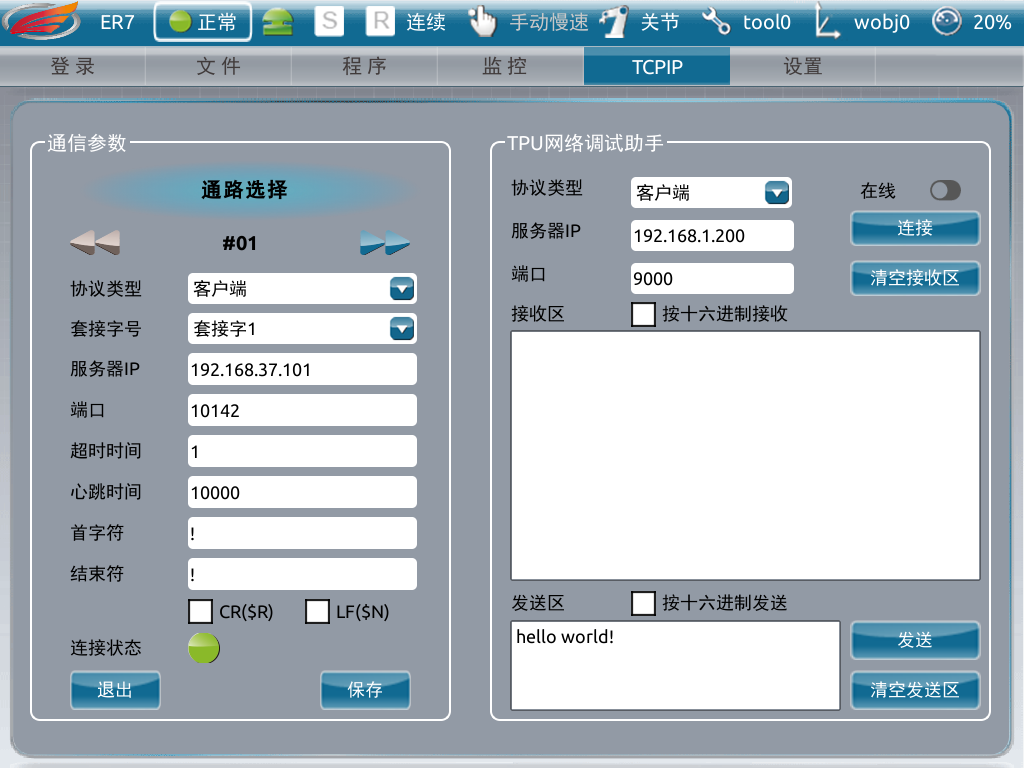
Efort 示教器配置工控机主控 SOCKET
注意:
工控机主控和机械臂主控均使用了 #01
以上截图设置是针对工控机主控的形式,如果是机械臂主控只需把端口的值修改为 11111, 超时时间修改为 10000
在
通路选择里通过左右切换选择#02然后进行如下设置
协议类型: 客户端
服务器 IP : 192.168.37.101 (工控机 IP)
端口: 10144
超时时间: 10000
心跳时间: 10000
首字符: !
尾字符: !
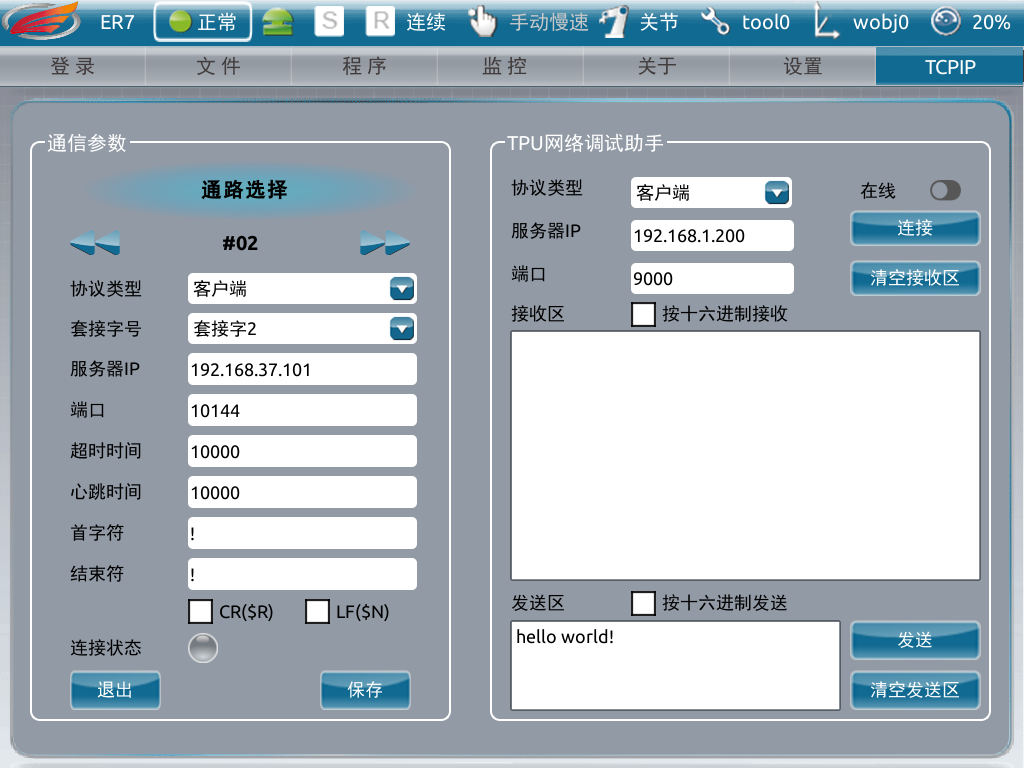
Efort 示教器配置工控机主控 SOCKET 2
使用U盘导入程序
机械臂开机后会到登录界面,输入管理员登录密码然后点击登录
准备一个文件系统为 FAT32 格式的U盘,将机械臂代码拷入 U 盘,并将 U 盘插入到示教器 USB 口上
在示教器上,点击
文件标签栏,点击底部USB->从 USB
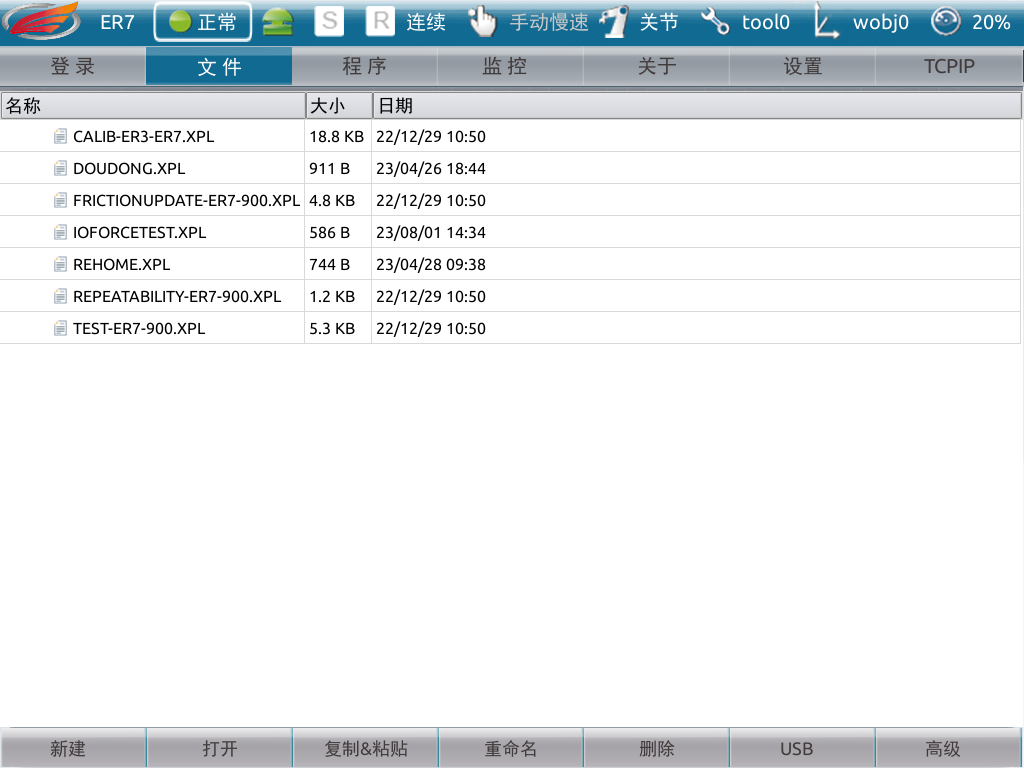
在弹出的界面中,选中需要导入的 XPL 文件, 然后点击
导入
导入时依次选择
XYZ_MASTER.XPLXYZ_MOTION.XPLXYZ_STATUS.XPL这三个文件进行导入。导入之后的文件界面如下图所示。