添加机械臂
如在新建项目时未添加机械臂模型,可在新建项目后,在 运动 页签下添加模型。
在 运动 页签下快捷工具栏,单击 机械臂。
选择机械臂类型并完成添加。
常规机械臂:选用Max内置的机械臂型模型。在左侧搜索栏搜索或根据品牌、轴数、臂展等条件筛选机械臂型号,单击待添加的机械臂型号,再单击右下角 确定。

导入机械臂:从本地导入机械臂urdf模型。
自定义机械臂:自定义添加机械臂时,需设置机械臂的轴数和欧拉角类型。
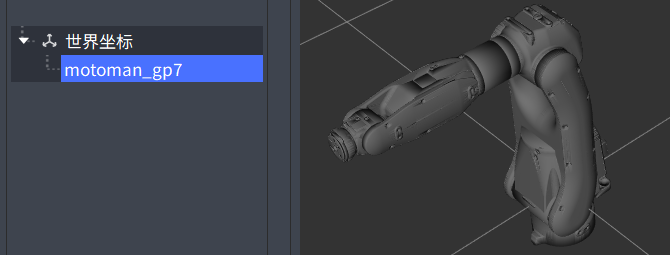
在中间预览窗口查看机械臂,并根据需要在右侧参数设置栏调整机械臂位姿。
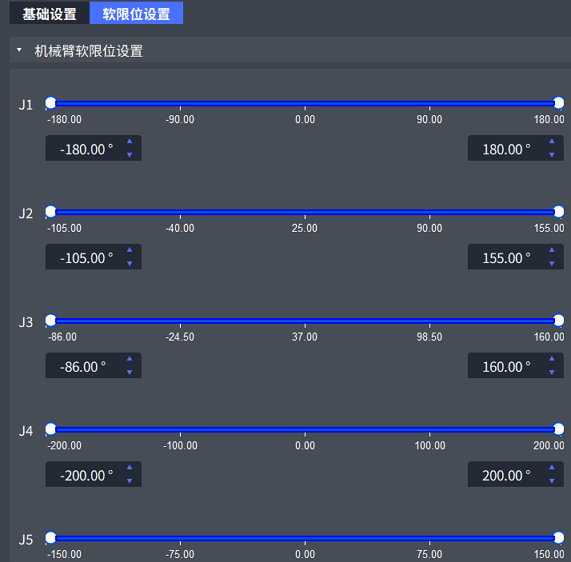
(可选)在右侧参数设置栏 软限位设置 页签下,修改关节限位,限制机械臂的运动范围,从而提高求解路径合理性,保护设备和人员安全。