2D/3D坐标移动
该场景使用视觉识别计算出工件坐标后,采用坐标移动的方式进行抓取,无需轨迹规划、碰撞检测,使用方便高效。
使用资源包
在配置该场景前,可先登录 XYZ Studio Max资源中心,下载2D/3D坐标移动的资源包。下载完成后,按照以下步骤熟悉该场景的视觉、运动、任务配置。
打开Max,在顶部菜单栏选择 “文件 > 打开项目”,选择并打开资源包里的.max文件。
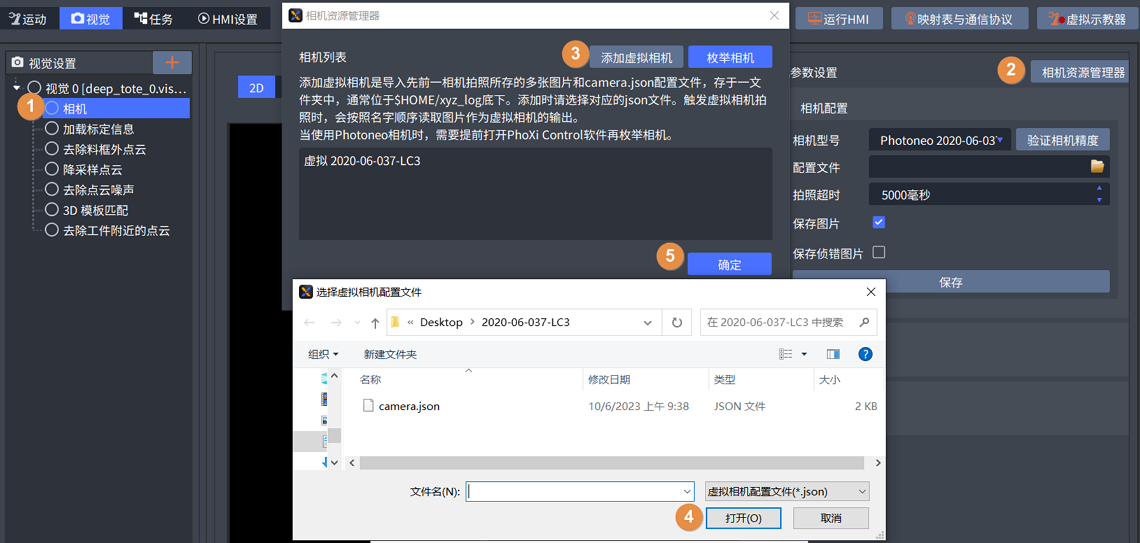
加载虚拟相机。工控机可通过虚拟相机,在不连接相机的情况下从本地获取图片等数据。
在 视觉 页签下,打开相机模块。
单击界面右上角 相机资源管理器,单击 添加虚拟相机,选择并打开资源包虚拟相机文件夹中的camera.json配置文件,单击 确定。
右上角 相机型号 选择资源包中的虚拟相机型号,单击 保存。单击中间预览窗口上方
 ,可查看虚拟相机中的图片。
,可查看虚拟相机中的图片。
查看视觉、运动、任务的配置。
案例讲解
本章以一个简单的圆环抓取项目为例,介绍2D/3D坐标移动场景的配置。在本项目中,圆环工件平铺摆放在料筐内,相机安装在机械臂上,要求使用ABB-IRB-1200-5-0-9机械臂,配合直爪夹具,将工件抓取并放入另一个料筐中。配置教程如下: