运动
在 运动 界面,设置机械臂的抓取处理流程。
创建项目时,已添加机械臂。如未添加,可在 运动 页签下快捷工具栏,单击 机械臂,添加机械臂,请参见 添加机械臂。
创建项目时,已添加料筐。如未添加,可在顶部快捷工具栏,单击 工作空间,选择 添加料筐,添加料筐后设置工作空间的尺寸、位姿、编号,请参见 添加料筐。
注册工具、工件,再注册抓取注册集。2D/3D坐标移动不涉及碰撞检测,在使用现实示教方式的前提下,工具和工件碰撞模型可不使用STL模型,比如可用长方体代替,软件从视觉检测结果中获取工件。如使用虚拟模型注册抓取,则需导入STL模型文件。
使用现实示教方式注册抓取
在 运动 页签下快捷工具栏,单击 末端工具,选择 注册工具。单击界面左下角 工具 节点,在右侧参数设置栏单击 添加,添加工具形态。
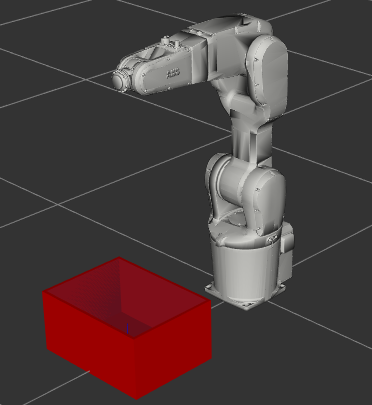
单击 碰撞模型 下方 添加,可不添加模型文件,用长方体代替,再单击 工具参考点 下方 添加,添加工具参考点,工具参考点位姿保持默认值即可。
单击界面右下角 完成,工具注册完成。
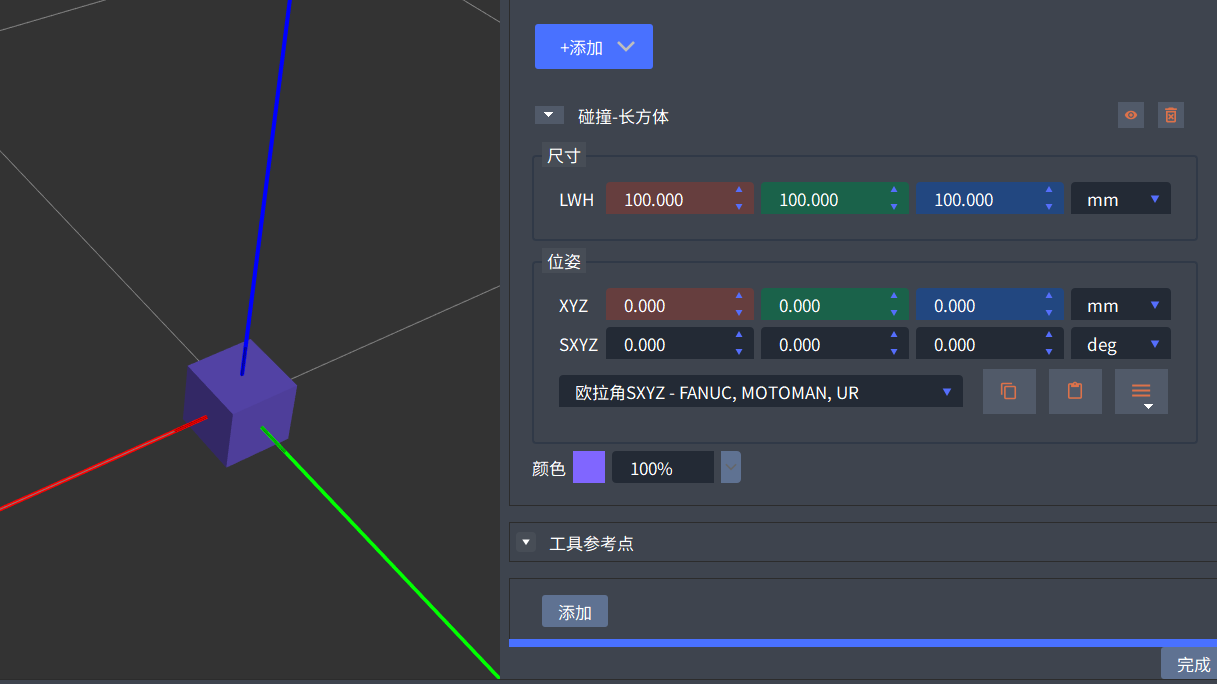
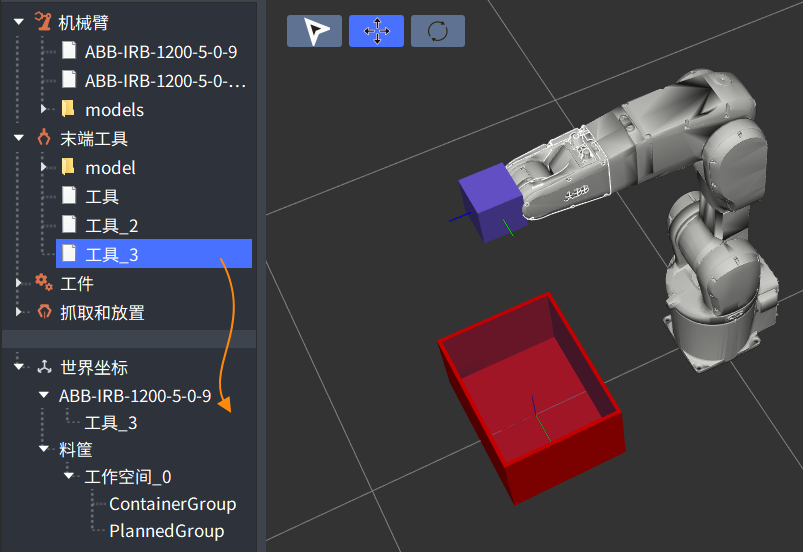
单击中间窗口上方的 环境 页签,将左侧环境编辑面板中的工具文件拖放到左下方机械臂模型节点下。
在顶部快捷工具栏,单击 工件,选择 注册工件。单击界面左下角 工件 节点,单击右侧参数设置栏 碰撞模型 下方添加,选择 长方体。

在顶部快捷工具栏,单击 抓取和放置,选择 “注册抓取方式 > 工件抓取注册”。单击界面左下角 抓取注册集 节点,在右侧参数设置栏 基本设置 下方选择已注册的工具和工件,将工件来源设置为 视觉侦测,选择视觉服务、相机使用场景,然后单击 检测工件,选择检测到的工件位姿,单击 创建注册抓取。
将注册方式设置为 现实示教,移动真实机械臂至抓取位姿,输入机械臂位姿。
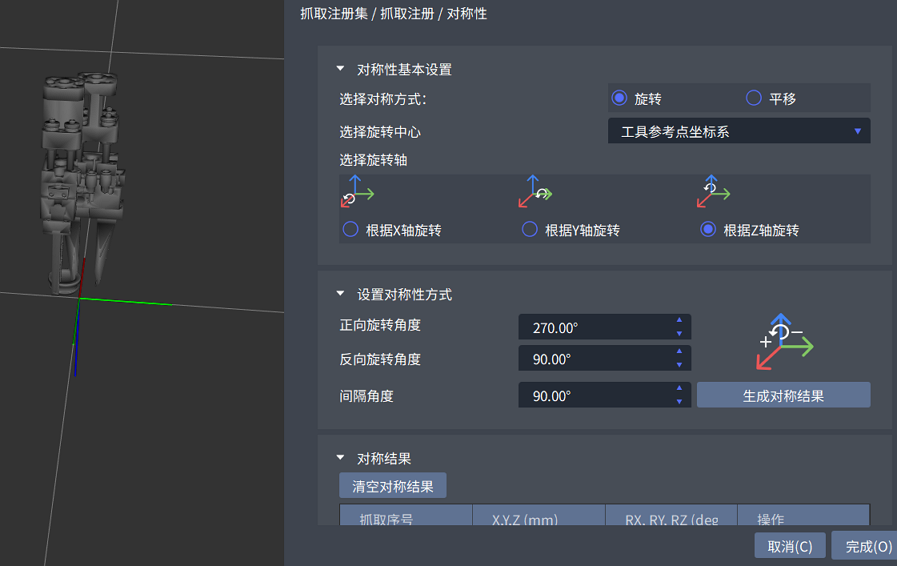
单击 对称性设置 下方 新增,通过旋转或平移变换遍历生成抓取位姿,单击界面右下角 完成。
使用虚拟模型注册抓取
注册抓取处理流程,参见 注册抓取处理流程。


在顶部工具栏,单击 抓取和放置,选择 “注册抓放规划 > 添加抓取处理流程”。
单击界面左下角 抓取处理流程 节点,在右侧参数设置栏选择前处理策略、抓取注册集、后处理策略。配置完成后,单击 下一步。
选择抓取工作空间,单击 测试运行,查看运行结果。确认无误后,单击右下角 完成。
