运动
在 运动 界面,设置机械臂夹取、放置、碰撞检测、运动路径等。
确认机械臂和相机连接无误后,开始配置运动相关设置,具体步骤如下。
在 运动 页签下,完成机械臂模型添加,具体方法请参见 添加机械臂。添加时注意确认实际所使用的机械臂和模型文件是否一致。
添加吸盘,具体方法请参见 注册吸具。
在世界坐标系中添加托盘、传送带。托盘或传送带的尺寸、位置需要用户根据实际情况设置。操作可参考 添加输送线 和 添加托盘。
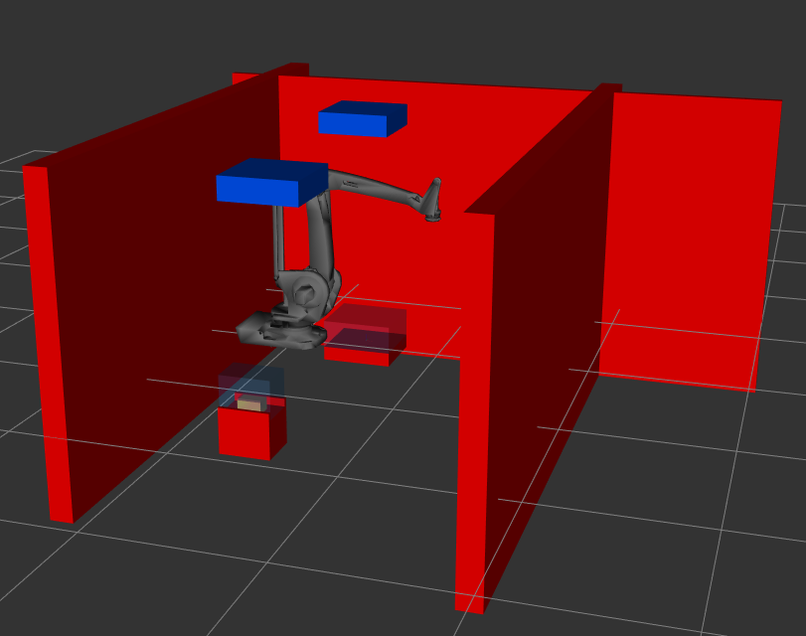
在世界坐标系中添加环境障碍物,环境障碍物的尺寸、位置需要用户手动测量,然后在世界坐标系中设置。最终配置的示例如下图所示。
提示
在实际项目执行过程中,运动 和 视觉 界面的设置可交替进行,具体可根据实际情况灵活调整。