注册抓工件方式
注册抓取工件的方式。
前提条件
在注册工件抓取方式前,需先注册工具和工件,操作参见 注册末端工具 和 注册工件。
操作步骤
在 运动 页签下快捷工具栏,单击 抓取方式,选择 工件抓取注册。
单击左下角 抓取注册集 节点,在右侧参数设置栏为该抓取方式绑定工具、工件等。
从 选择工具 右侧下拉列表中选择已注册的工具。
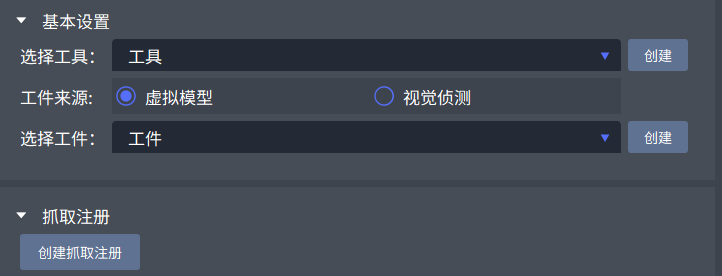
选择工件来源。
虚拟模型:选择已注册的工件模型。
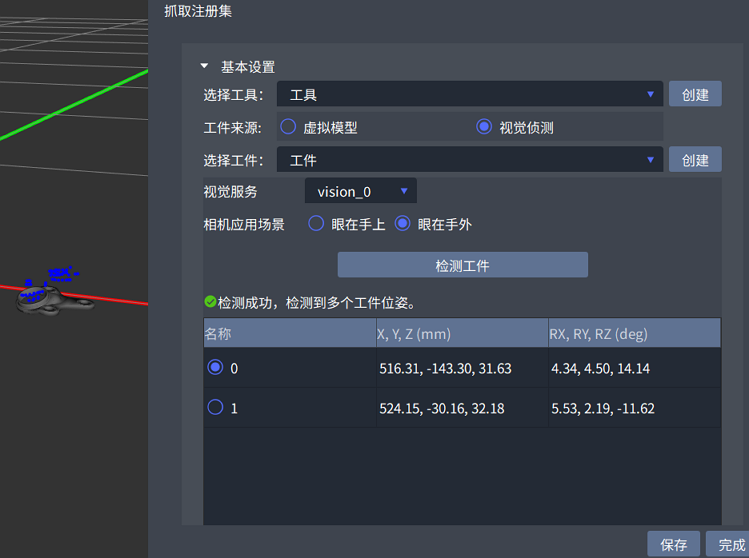
视觉侦测:从视觉检测结果中选择较为稳定的工件位姿用于注册。如勾选此项,需选择工件、视觉服务、相机使用场景,然后单击 检测工件,选择检测到的工件位姿。
单击 创建抓取注册。
在 注册抓取 下方选择工具形态,在 注册位姿 下方设置抓取位姿。
如果工件来源为虚拟模型,创建注册抓取后,选择控制轴,一般设为工具参考点即可,再单击 对齐控制轴与工件坐标,使工具参考点和工件的坐标系对齐,然后调整工具位置至合适的抓取位置和角度。

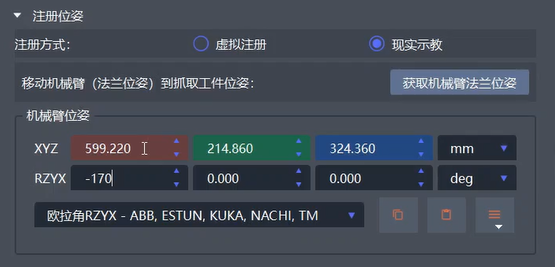
如果工件来源为视觉侦测,则注册方式可选择 现实示教,移动真实机械臂至抓取位姿,输入机械臂位姿。
单击 对称性设置 下方 新增,通过旋转或平移变换遍历生成抓取工件所需的合理位姿。
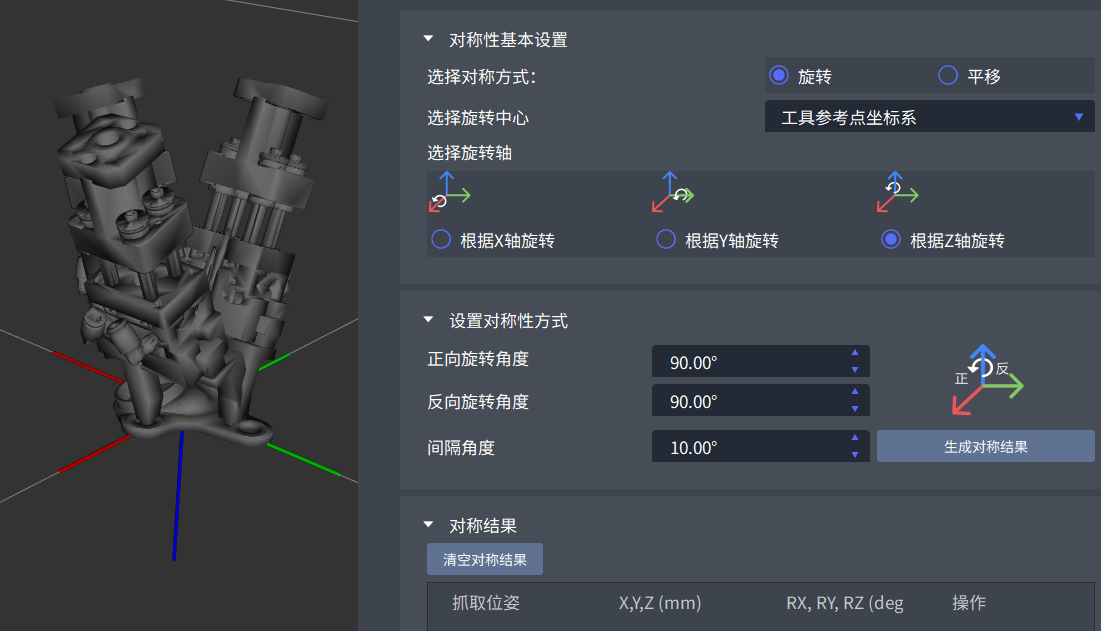
旋转遍历性设置
将对称方式设置为旋转。
选择旋转中心,默认为工具参考点坐标系。
选择旋转轴,可选择X轴、Y轴或Z轴。
设置正向旋转角度、反向旋转角度、间隔角度。在中间的预览窗口可预览生成效果。
单击 生成对称结果。在 对称结果 下方查看生成结果。
单击界面右下角 完成。
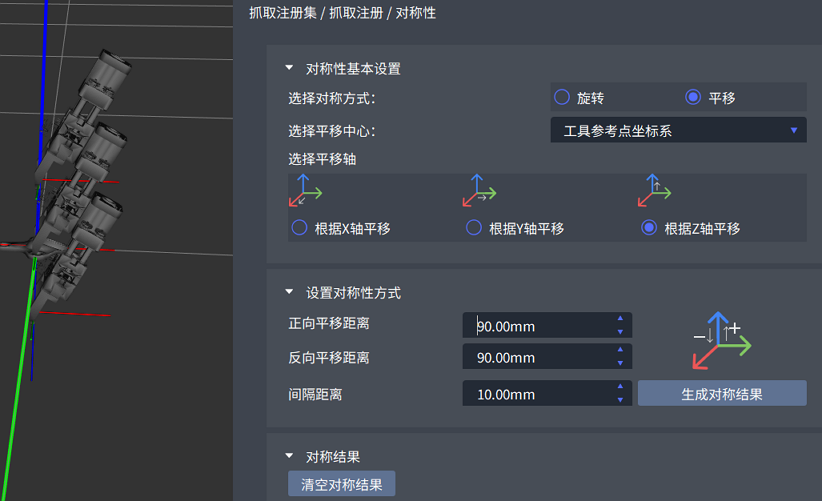
平移遍历性设置
将遍历方式设置为平移。
选择平移中心,默认为工具参考点坐标系。
选择平移轴,可选择X轴、Y轴或Z轴。
设置正向平移角度、反向平移角度、间隔角度。在中间的预览窗口可预览生成效果。
单击 生成对称结果。在 对称结果 下方查看生成结果。
单击界面右下角 完成。
单击界面右下角 完成。
完成抓取方式注册后,还需将抓取方式添加到抓取处理流程中,以便任务规划时读取,请参见 注册抓放规划。