注册抓箱子方式
注册抓取箱子的方式,一般用于拆码垛场景。
前提条件
在注册箱子抓取方式前,需先注册吸具,操作参见 注册吸具。
操作步骤
在 运动 页签下快捷工具栏,单击 抓取方式,选择 箱子抓取注册。
单击左下角 箱子抓取注册 节点,在右侧参数设置栏选择抓取方式。
单抓:一次抓取一个箱子。
多抓(同一箱型):在箱型一致的情况下,一次抓取多个箱子。
如果选择多抓(同一箱型),需设置多抓合并参数。如使用其他抓取方法,则可跳过此步骤。
允许长边合并:是否允许两个物体长边合并,即沿着物体y方向合并。
允许短边合并:是否允许两个物体短边合并,即沿着物体x方向合并。
最大合并数:多抓时最大合并抓取个数。
高级参数:启用 高级参数 后,可配置以下参数。
合并最大允许高度差:两个箱子的高度差小于等于此阈值,才能合并。
和理想合并位置最小重叠比例:合并位置与理想位置重叠比例不低于该值,才能合并。
提示
鼠标指向该参数,可查看图解说明。
计算时限:允许计算合并的最大时间。
正方形判断阈值:一般使用默认值即可。如果箱子的长宽差小于该阈值,则认为箱子表面为正方形。

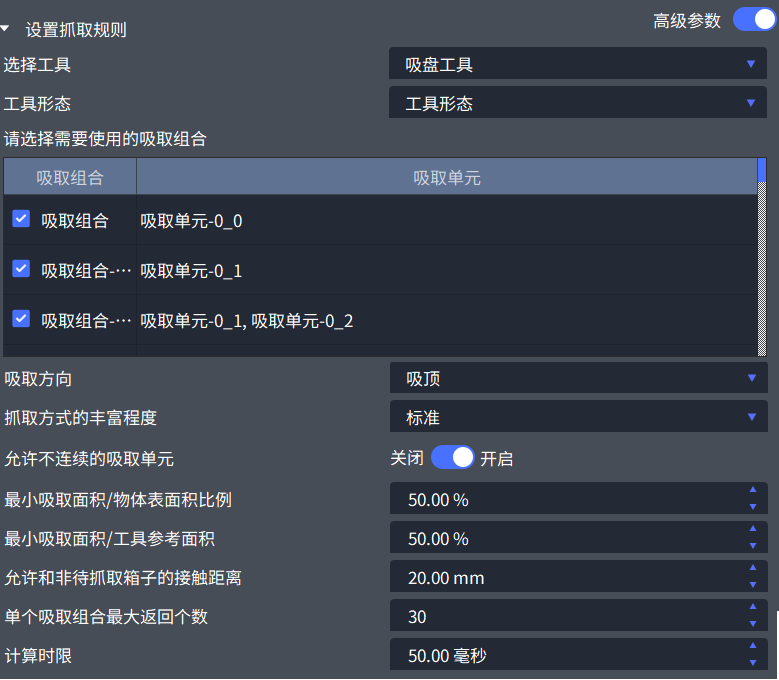
设置抓取规则。
选择工具:选择已注册的吸盘工具。
工具形态:选择已添加的工具形态。
请选择需要使用的吸取组合:从吸取组合列表中选择需使用的组合。
最小吸取面积/物体表面积比例:吸盘与箱子重合的面积占箱子面积的比例大于此值,才能吸取成功。
最小吸取面积/工具参考面积:吸盘与箱子重合的面积占吸盘吸取面表面积的比例大于此值,才能够吸取成功。
高级参数:启用 高级参数 后,可配置以下参数。
吸取方向:默认为 吸顶。
抓取方式的丰富程度:可选择 标准 或 冗余。冗余模式下,抓取方式更丰富。
允许不连续的吸取单元:选择是否允许不连续的吸取单元。
单个吸取组合最大返回个数:单个吸取组合最多返回的吸取个数。
计算时限:允许计算吸取姿态的最大时间。
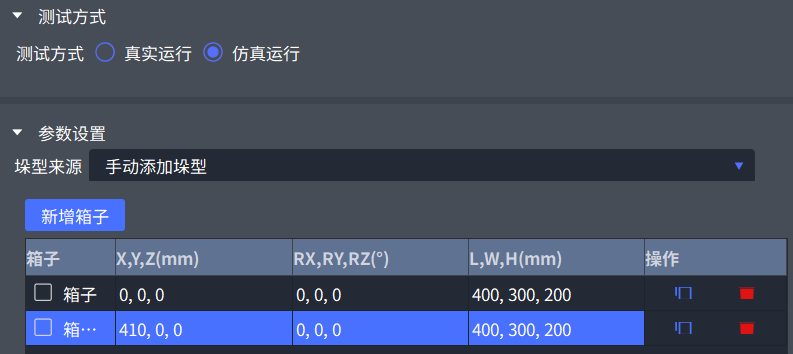
在 测试参数配置 页签下,设置测试参数。选择测试方法,支持 真实运行 和 仿真运行,然后配置其他参数。
真实运行
选择是否为相同箱型。
选择视觉服务编号、相机应用场景。如果相机应用场景是眼在手上,需设置拍照位姿。
选择是否启用视觉检测工件尺寸。相同箱型 选择 是 后,该功能自动启用,且不可关闭。
选择箱子条码位置。
单击 检测工件。

仿真运行
选择垛型来源为 从环境导入垛型,设置工作空间。
选择垛型来源为 手动增加垛型,单击 新增箱子,设置箱子尺寸、位姿、条码位置等参数,单击 确定。可重复此步骤,添加更多箱子,或单击 操作 列的
,复制生成新的箱子。
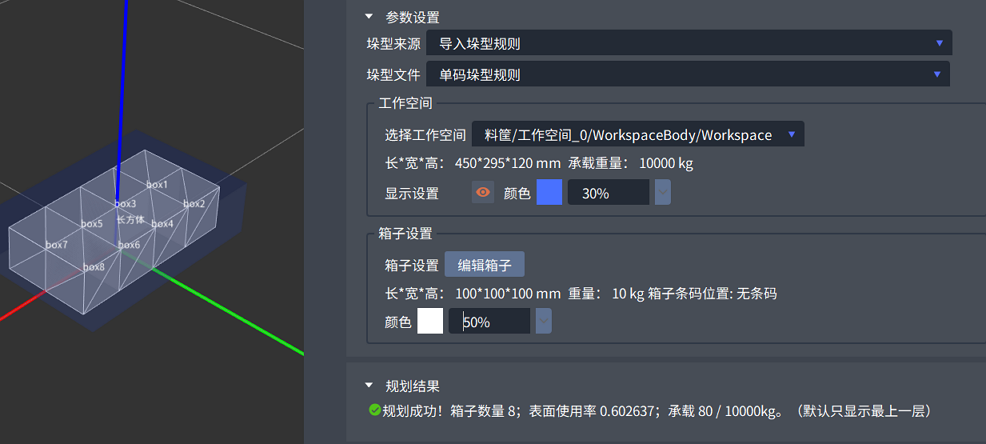
选择垛型来源为 导入垛型规则,选择已注册的垛型文件(请参见 注册放置方式),选择工作空间,单击 编辑箱子,设置箱子尺寸和条码位置,查看规划结果。
在 运行结果 页签下,单击 测试运行,查看运行结果。确认无误后,单击右下角 完成。
完成抓取方式注册后,还需将抓取方式添加到抓取处理流程中,以便任务规划时读取,请参见 注册抓放规划。