注册末端工具
注册工具
在 运动 页签下快捷工具栏,单击 末端工具,选择 注册工具。
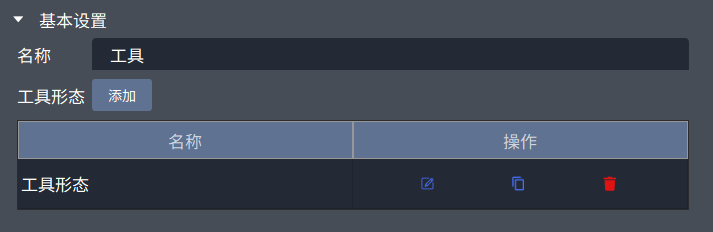
单击界面左下角 工具 节点,在右侧参数设置栏单击 添加,添加工具形态。
在 工具形态 页签下,单击 碰撞模型 下方 添加,选择 模型文件,单击
 ,选择 STL 模型路径。
,选择 STL 模型路径。提示
如果将 可视化和碰撞模型一致 设置为 “否”,则需分别设置碰撞模型和可视化模型。
除了导入STL模型,也可添加长方体、圆柱体或球体模型。
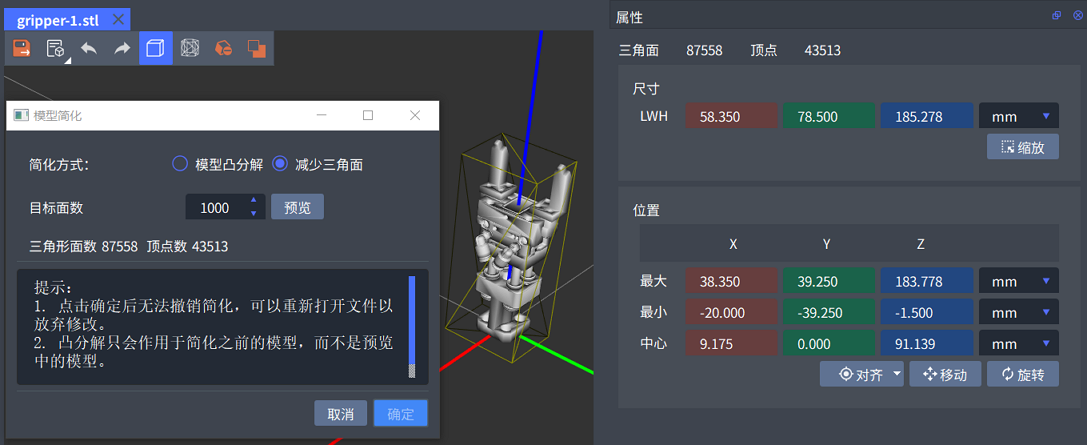
查看模型基本信息,为不影响后续计算,如果模型三角面数大于1000,建议先使用模型编辑器,将三角面数减至1000以下。
单击
 ,确认模型信息,单击 导入。
,确认模型信息,单击 导入。提示
也可在顶部工具栏,选择 “工具 > 模型编辑器”,打开模型编辑器后导入模型。
在 Max模型编辑器 窗口顶部工具栏,选择 “编辑 > 模型简化”,将简化方式设置为 减少三角面,输入目标面数后,单击 确认,三角面数会减少至设置的数量。
在 Max模型编辑器 窗口顶部工具栏,选择 “文件 > 保存”。回到 工具形态 页签下,重新导入简化后的模型。
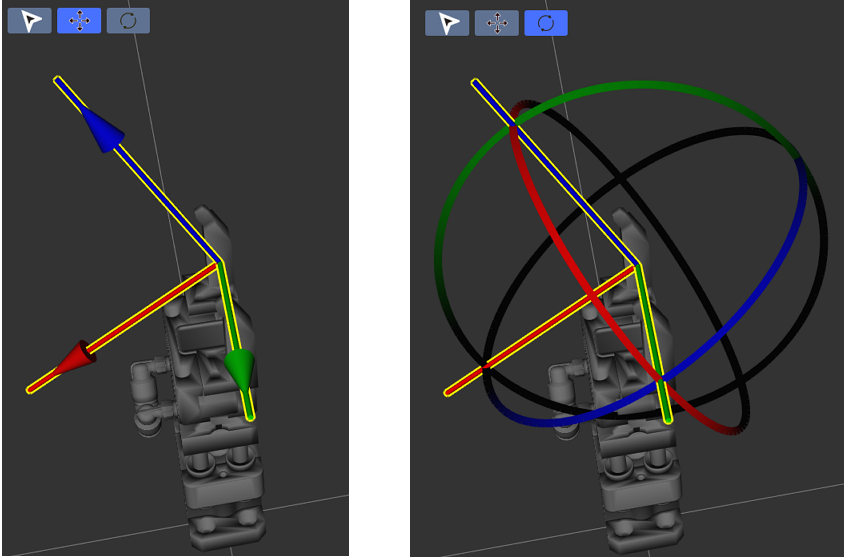
在 工具形态 页签下,设置工具参考点。单击 工具参考点 下方 添加,在中间的预览窗口,将工具参考点拖放到工具尖端,单击右侧参数设置栏右下角 完成。
小技巧
建议将工具参考点放置在工具两个尖端中间,Z轴方向与尖端朝向平行。
单击
 ,按住X、Y、Z轴三个方向的箭头移动位置。
,按住X、Y、Z轴三个方向的箭头移动位置。单击
 ,按住圆环旋转角度。
,按住圆环旋转角度。单击
 ,退出移动或旋转模式。在移动或旋转模式下,无法更改右侧参数设置栏信息。
,退出移动或旋转模式。在移动或旋转模式下,无法更改右侧参数设置栏信息。
回到 工具形态 页签,单击右下角 完成,回到 **工具**页签,如果工具有多种形态,比如张开与闭合,可单击 添加,重复以上步骤添加更多工具形态。
在 工具形态 页签下,单击右下角 完成并添加到机械臂,将工具加载至机械臂上。

注册吸具
注册吸具,一般用于拆码垛场景。
在 运动 页签下快捷工具栏,单击 末端工具,选择 注册吸具。
单击界面左下角 吸盘工具 节点,在右侧参数设置栏单击 添加,添加工具形态。
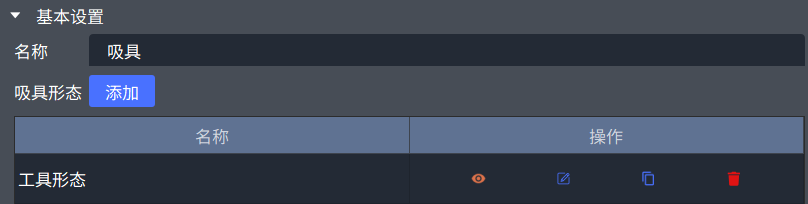
注册工具模型。在 工具形态 页签下,系统已默认添加一个长方体碰撞体,可根据需要修改该长方体碰撞体的尺寸和位姿,系统默认以该长方体的尺寸和位姿为参考生成吸盘基准面。
提示
如果将 可视化和碰撞模型一致 设置为 “否”,则需分别设置碰撞模型和可视化模型。

单击 下一步,注册吸取单元。吸取单元指物理层面的吸取单元,即实际IO能够控制的最小单元。
设置吸盘基准面的尺寸与位姿。
设置吸盘物理属性,包括原始高度、吸取后高度、单位面积吸取重量。

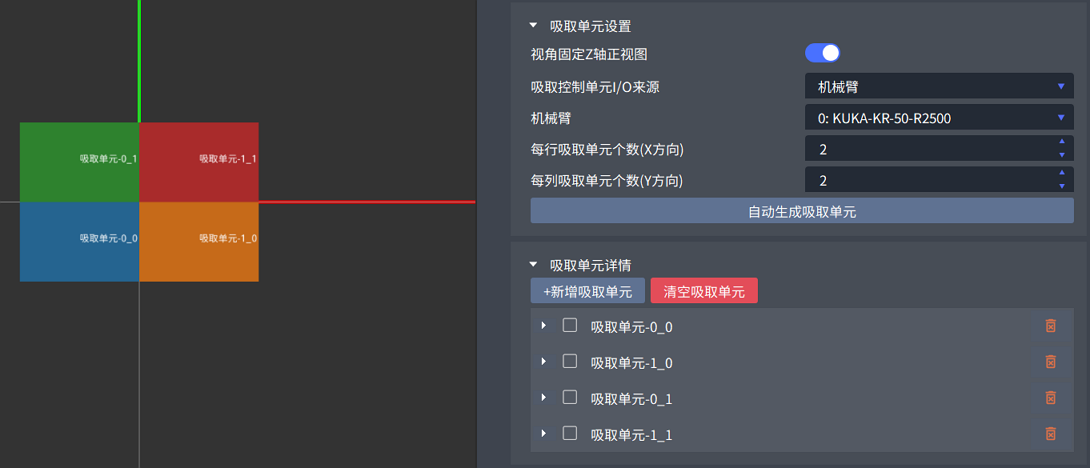
设置吸取单元。启用 视角固定Z轴正视图,使中间预览窗口的视角固定在Z轴正视图,设置I/O来源以及X和Y方向上吸取单元数量,单击 自动生成吸取单元。可在参数栏 吸取单元详情 下方查看生成结果。
单击每个吸取单元左侧
 ,设置对应吸取单元的I/O。I/O端口号需与实际机械臂设置的IO端口保持一致,否则会造成运算与实际不符。
,设置对应吸取单元的I/O。I/O端口号需与实际机械臂设置的IO端口保持一致,否则会造成运算与实际不符。抓取I/O:单击 抓取I/O 下方 添加IO端口,设置I/O端口号和放置值。
放置I/O:单击 放置I/O 下方 添加IO端口,设置I/O端口号和放置值。
掉箱检测I/O:启用掉箱检测后,单击 添加IO端口,设置IO端口号、未掉箱时的值。
提示
设置掉箱检测I/O,如果考虑传感器具体位置,则需设置传感器点位和直径。
如有多个IO端口,需设置使用逻辑,可选择 和 或 或。

单击 下一步。
注册吸取组合。单击 生成吸取组合,创建吸取组合,单击界面右下角 完成,回到 吸具 页签,单击右下角 完成并添加到机械臂,将吸具加载至机械臂上。