安装驱动
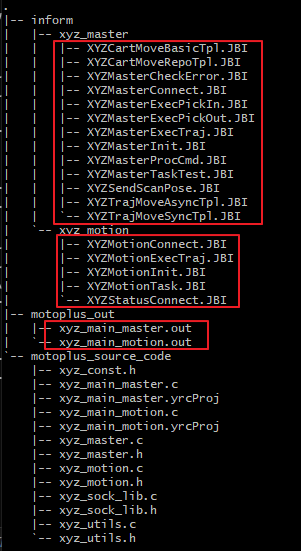
motoman 机械臂驱动文件列表
- – inform 安川机械臂前台程序
- – xyz_master 机械臂主控程序
XYZCartMoveBasicTpl.JBI 坐标移动基础模板程序
XYZCartMoveRepoTpl.JBI 坐标移动二次定位模板程序
XYZMasterCheckError.JBI 检查ErrorCode程序
XYZMasterConnect.JBI 通讯连接程序
XYZMasterExecPickIn.JBI 执行PickIn轨迹程序
XYZMasterExecPickOut.JBI 执行PickOut轨迹程序
XYZMasterExecTraj.JBI 通用执行轨迹程序
XYZMasterInit.JBI 初始化程序
XYZMasterProcCmd.JBI 指令调用程序
XYZMasterTaskTest.JBI 内部测试程序
XYZSendScanPose 发送拍照位姿程序
XYZTrajMoveAsyncTpl.JBI 轨迹移动异步模板程序
XYZTrajMoveSyncTpl.JBI 轨迹移动同步模板程序
- – xyz_motion 工控机主控程序
XYZMotionConnect.JBI motion通讯连接程序
XYZMotionExecTraj.JBI 轨迹执行程序
XYZMotionInit.JBI 初始化程序
XYZMotionTask.JBI 工控机主控主程序
XYZStatusConnect.JBI status通讯连接函数
- – motoplus_out 编译好的 motoplus .out 文件
xyz_main_master.out 机械臂主控 .out文件
xyz_main_motion.out 工控机主控 .out文件
- – motoplus_source_code motoplus 源码
xyz_const.h 全局变量定义区
xyz_main_master.c 机械臂主控的主程序
xyz_main_master.yrcProj 机械臂主控的MotoPlus项目文件
xyz_main_motion.c 工控机主控的主程序
xyz_main_motion.yrcProj 工控机主控的MotoPlus项目文件
xyz_master.c 机械臂主控api函数实现
xyz_master.h 机械臂主控api函数头文件
xyz_motion.c 工控机主控api函数实现
xyz_motion.h 工控机主控api函数头文件
xyz_sock_lib.c socket相关实现
xyz_sock_lib.h socket头文件
xyz_utils.c 实用函数实现
xyz_utils.h 实用函数头文件
维护模式下:网络设定和烧录 .out 文件
进入维护模式:切换到手动模式 -> 控制柜关机 -> 长按示教器的 “主菜单”按钮 -> 控制柜上电 -> 进入到“维护模式”后松开按钮
登录到“管理模式”:
主菜单->系统->安全模式,在下拉菜单中选择管理模式,密码为“99999999999999”输到头 -> “回车”网络设置
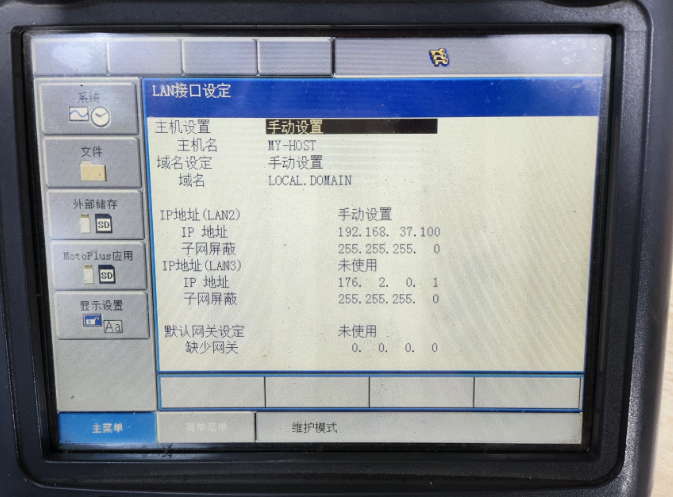
主菜单->系统->设置->选项功能->LAN接口设置,按下选择按钮。将
主机设置改为手动设置,IP地址改为手动设置,修改 IP 和子网屏蔽 -> 按回车,在所显示的确认对话框中选择是
IP地址: 192.168.37.100
子网屏蔽: 255.255.255.0
ip设置
启用Motoplus功能
主菜单->系统->设置->选项功能->MotoPlus功能-> 设置为“使用” -> 在所显示的各确认对话框中选择是即可
将如下所示的安川驱动程序文件拷贝到到USB根目录下,将USB存储器插入示教器的USB端口
注:不拷贝到根目录下也可以,但后续需要在安川示教器上先切换文件夹
Motoplus(.out)程序导入
主菜单->MotoPlus应用->装置->USB:示教编程器如已存在.out,则需先删除:
主菜单->MotoPlus应用->删除-> 选择对应的.out ->回车-> 确认删除
主菜单->MotoPlus应用->安装(用户应用程序)-> 选择对应的.out并按选择按钮进行安装如果需要用工控机主控,则加载
xyz_main_motion.out,如果需要机械臂主控,则加载xyz_main_master.out
重启:
主菜单->系统->CPU重置->复位->是
或者直接控制柜电源开关重启也可以
导入 INFORM 文件
以正常方式开机(不按住
主菜单)将安川驱动程序文件拷贝到到USB根目录下,将USB存储器插入示教器的USB端口
拷贝的内容同上文
主菜单->外部储存->装置->选择装置->USB:示教编程器主菜单->外部储存->安装->程序-> 选择所有的.JBI->回车-> 覆盖方式选择强制执行->执行制执行和诊断执行的区别:强制执行会直接覆盖,诊断执行可以选择性覆盖
此时,程序已经全部导入。