运行程序
通讯说明
工控机和 ABB 机械臂的通讯方式为 TCP/IP :工控机作为 TCP/IP 的服务端,机械臂作为 TCP/IP 的客户端。
启动程序
运行工控机主控
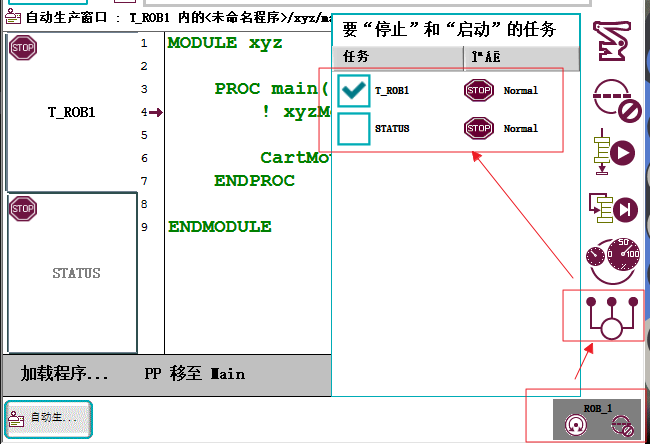
在示教器是手动模式的情况下,通过示教器右下角图标可以查看当前启动的任务。工控机主控的情况需要这2个都勾选:
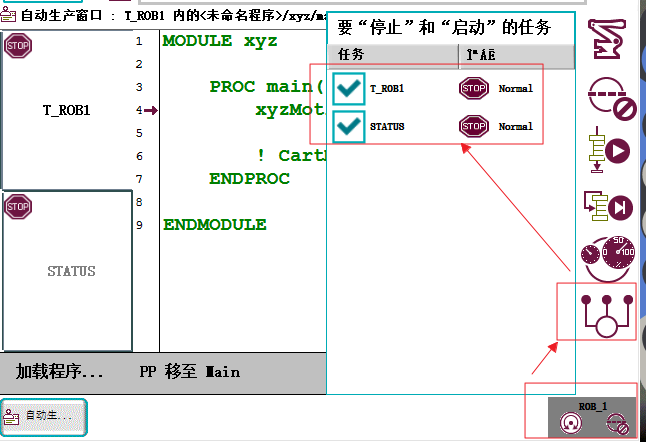
勾选需要运行的任务
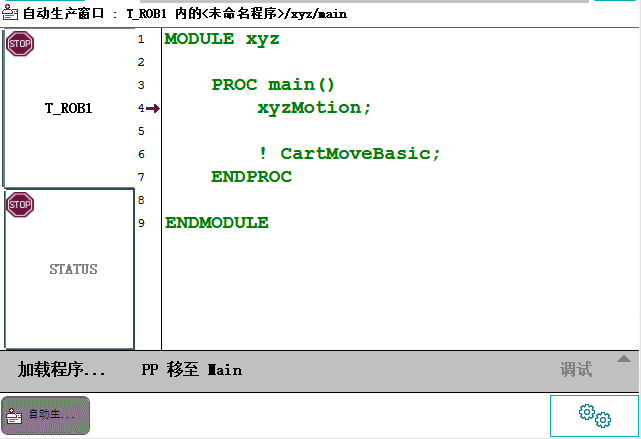
修改 T_ROB1 中的 main 函数,将 CartMoveBasic 注释掉,保留 xyzMotion ,表示运行工控机主控。
MENU -> 自动生产窗口, 点击 PP 移至 Main, 自动模式下上使能运行程序即可。
启动程序
注:如果运行时发现 转角路径故障, 通常是 MAX 任务流图设置的圆滑度( ZONE )过大,可以调整到零或较小值。
如果有修改工控机的IP地址,则程序中需要同步修改ip地址,修改如下:
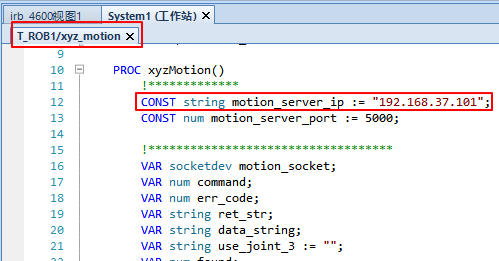
修改motion的ip地址
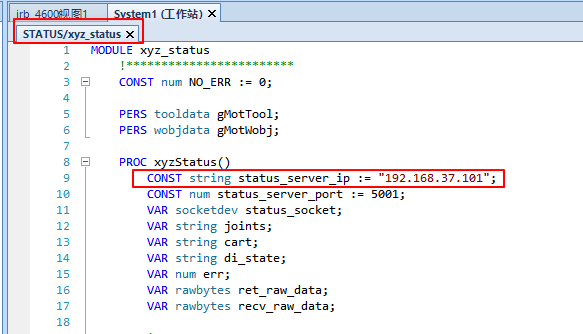
修改status的ip地址
对于拆码垛且六轴朝下的项目,建议将代码中 xyz_motion 中的所有的 SingArea \Wrist 改成 SingArea \LockAxis4,否则在奇异点附近会有旋转四轴的情况出现

代码中有多处,这里只展示一处
运行机械臂主控
在示教器是手动模式的情况下,通过示教器右下角图标可以查看当前启动的任务。工控机主控的情况下只需要勾选T_ROB1:
勾选需要运行的任务
修改 T_ROB1 中的 main 函数,将 xyzMotion 注释掉,保留 CartMoveBasic ,表示运行机械臂主控。
MENU -> 自动生产窗口, 点击 PP 移至 Main , 运行程序即可。
CartMoveBasic 是下位机坐标移动基础模板,不一定适合现场项目,不可以直接运行, 需要根据项目具体流程和需求进行修改。程序中提供了4个模板函数,分别是 “CartMoveBasic” , “CartMoveRepo” , “TrajMoveSync” , “TrajMoveAsync” :
“CartMoveBasic”是坐标移动的基础模板,包含了眼在手上和眼在手外的基础运行逻辑。
“CartMoveRepo” 提供了坐标移动带工件二次定位的运行逻辑。
“TrajMoveSync”是轨迹移动的同步方式模板,即每次请求获取轨迹后,都会立即执行获取的轨迹。
“TrajMoveAsync”是轨迹移动的异步方式模板,会在抓取到工件执行完出抓取区域轨迹后开始下一次请求规划指令,然后再继续请求未执行完的放置轨迹。
请注意模板函数并不能直接运行,请一定根据项目现场环境和流程需求进行修改