安装驱动
iNexBot 机械臂驱动文件列表
代码可从 MAX 安装目录下的 share/robot_code 中获取。
├── lua
│ └── xyz_status.lua
└── robotJob
└── R1
├── AxyzCartMoveBas.JBR 座标移动基础模板
├── AxyzCartRepo.JBR 座标移动二次定位模板
├── AxyzMasterTest.JBR 机械臂主控api测试程序
├── AxyzMotion.JBR 工控机主控程序
├── AxyzTrajAsync.JBR 轨迹移动异步模板
├── AxyzTrajSync.JBR 轨迹移动同步模板
├── NxyzGetCartPose.JBR 以下以N开头的函数,均为工控机主控函数,不能调用
├── NxyzGetCurJoints.JBR
├── NxyzGetDI.JBR
├── NxyzGetVersion.JBR
├── NxyzMotionParse.JBR
├── NxyzMovejSeq.JBR
├── NxyzMovelSeq.JBR
├── NxyzMovelUntil.JBR
├── NxyzSetAcc.JBR
├── NxyzSetCartMovej.JBR
├── NxyzSetCartMovel.JBR
├── NxyzSetDO.JBR
├── NxyzSetJntsMovej.JBR
├── NxyzSetJntsMovel.JBR
├── NxyzSetSpeed.JBR
├── NxyzSetTool.JBR
├── NxyzSetZone.JBR
├── RobotResetProgram.ResetPro
├── xyzCalGraspPose.JBR 以下以xyz开头的函数,均为机械臂主控函数,可以调用
├── xyzCalObjPose.JBR
├── xyzCapImg.JBR
├── xyzExeTraj.JBR
├── xyzGetCapImg.JBR
├── xyzGetGraspPose.JBR
├── xyzGetObjPose.JBR
├── xyzGetObjType.JBR
├── xyzGetPickIn.JBR
├── xyzGetPickOut.JBR
├── xyzGetPlaceIn.JBR
├── xyzGetPlaceOut.JBR
├── xyzNormalParse.JBR
├── xyzReqCapImg.JBR
├── xyzReqGraspPose.JBR
├── xyzReqObjPose.JBR
├── xyzReqPick.JBR
├── xyzReqPickPlace.JBR
├── xyzReqPlace.JBR
├── xyzResetPalStat.JBR
├── xyzResetTask.JBR
├── xyzSendCurCart.JBR
├── xyzSendCurJoints.JBR
├── xyzSendExtJoints.JBR
├── xyzStatus.JBPG
├── xyzSwitchApp.JBR
├── xyzSwitchFlow.JBR
├── xyzSwitchItem.JBR
├── xyzSwitchStrat.JBR
├── xyzSwitchTool.JBR
├── xyzUpdObjOnHand.JBR
├── xyzUpdObjToHand.JBR
└── xyzUpdTotePose.JBR
设定机械臂 IP
在示教器,将操作用户改为管理员,密码为“123456”。
进入 设置 -> 系统设置-> ip 设置,修改网口1 ip,修改控制器 ip。
为降低出错可能,建议使用默认 ip,注意工控机也要将 ip 改为相同网段(192.168.1.101)。
网口1 “控制器IP”设置为:192.168.1.13
本机 ip 设为:192.168.1.102 或同网段其他值
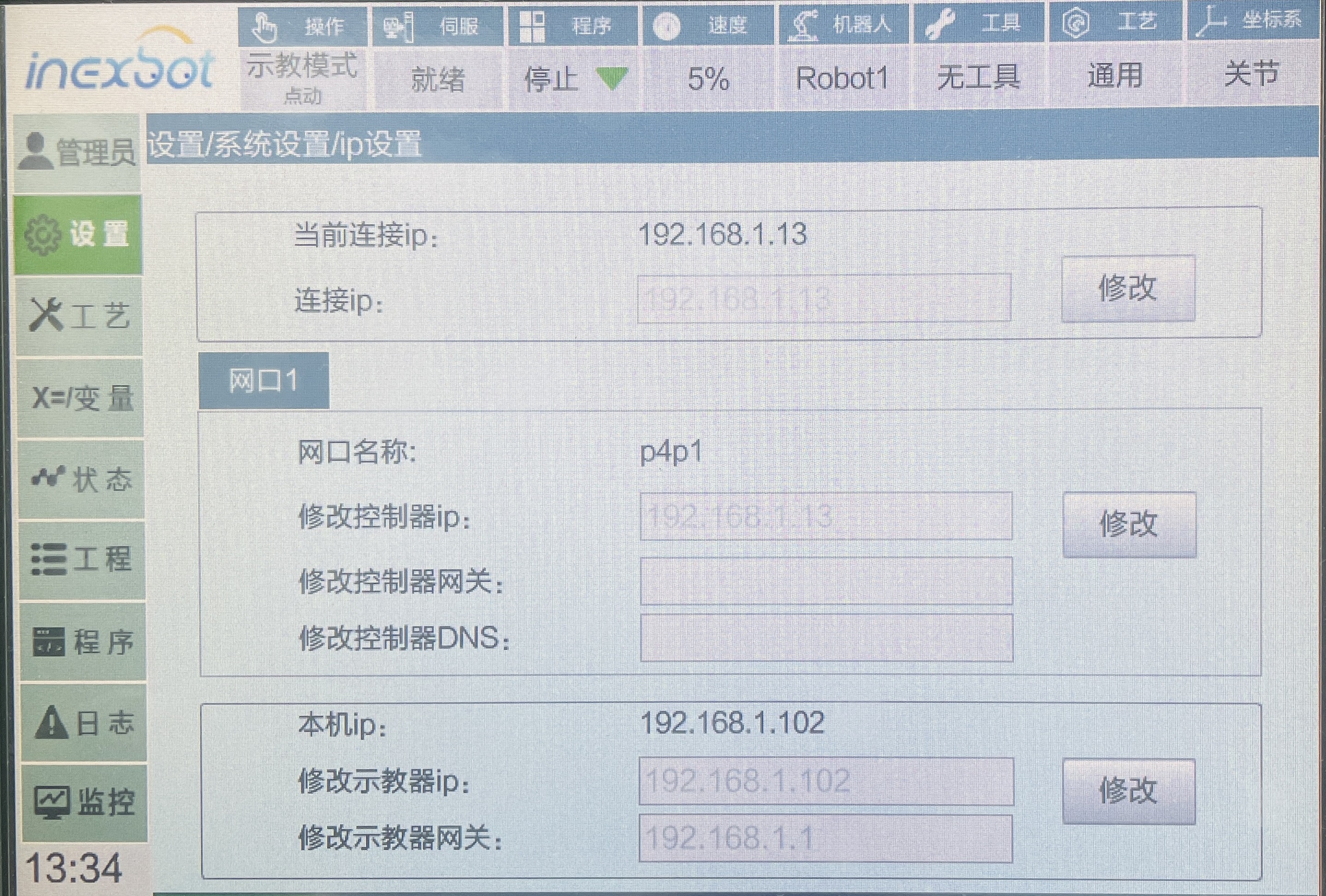
iNexBot 设定机械臂 IP
网络设置完成后重启机械臂生效。
配置 SOCKET 通信
打开 设置 -> TCP 通讯设置:
机械臂主控使用的是工艺号1, 修改方式为
客户端, IP 为 192.168.1.101,端口号为 11111, 帧头为空,分割符为“,”, 结束符为 “#”,进制为十进制。工控机主控使用的工艺号2,修改方式为
客户端, IP 为 192.168.1.101,端口号为 5000, 帧头为空,分割符为“,”, 结束符为 “#”,进制为十进制。工控机主控还需要使用 lua 脚本中的 socket,已在lua文件定义,无需修改,只需导入 lua 程序即可。

