安装驱动
kawasaki 机械臂驱动文件列表
- – kawasaki
xyz_lib.as (全局常量、通讯函数)
xyz_master.as (机械臂主控程序)
xyz_motion.as (工控机主控前台程序)
xyz_status.as (工控机主控后台程序)
使用 KRterm 导入程序
用网线连接装好 KRterm 的电脑和控制柜上的 网线接口 。
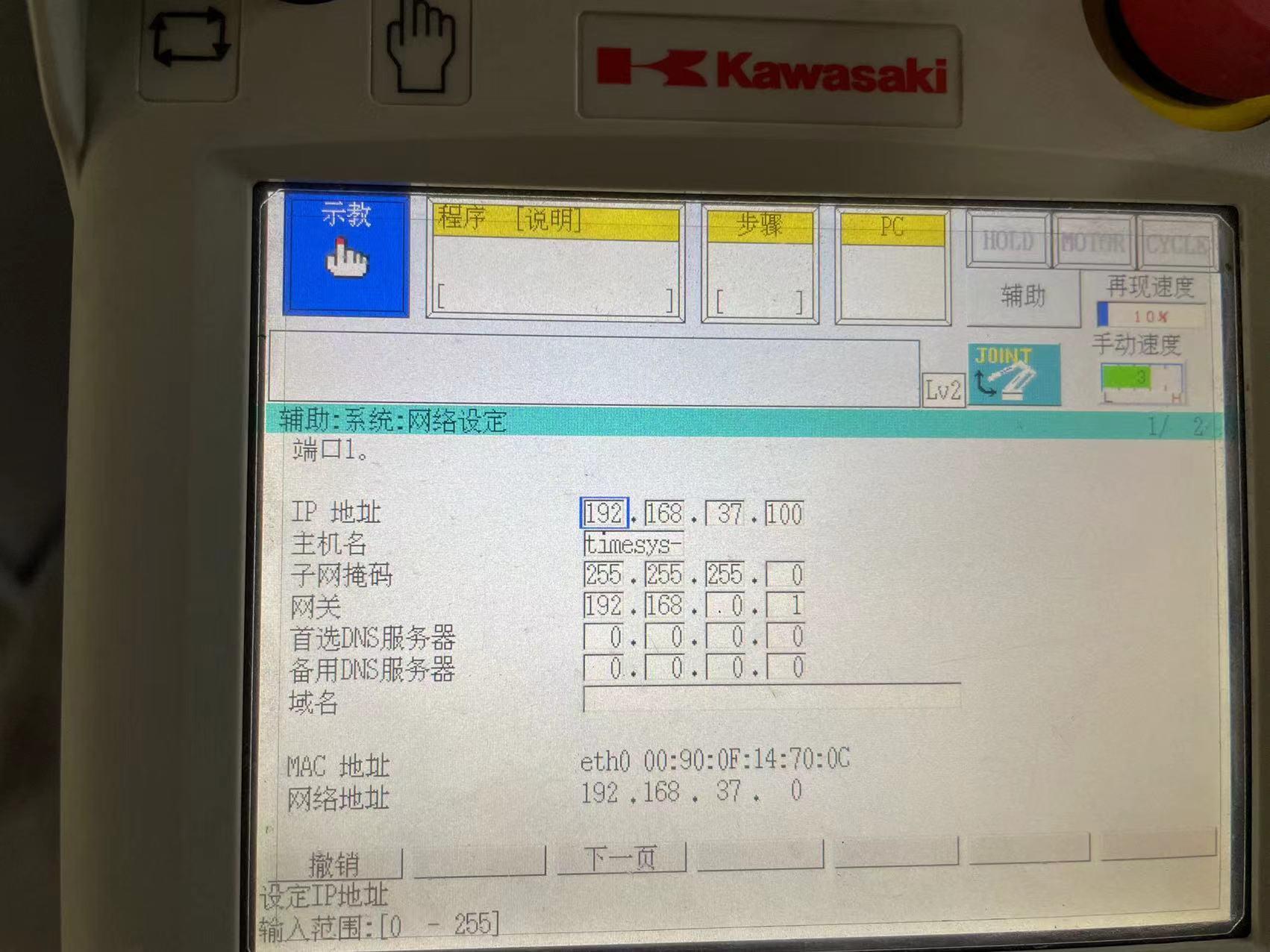
将电脑的ipv4网络设定为:
“IP”设置为:192.168.37.100
“子网掩码”设置为:255.255.255.0
“默认网关”设置为:192.168.37.0
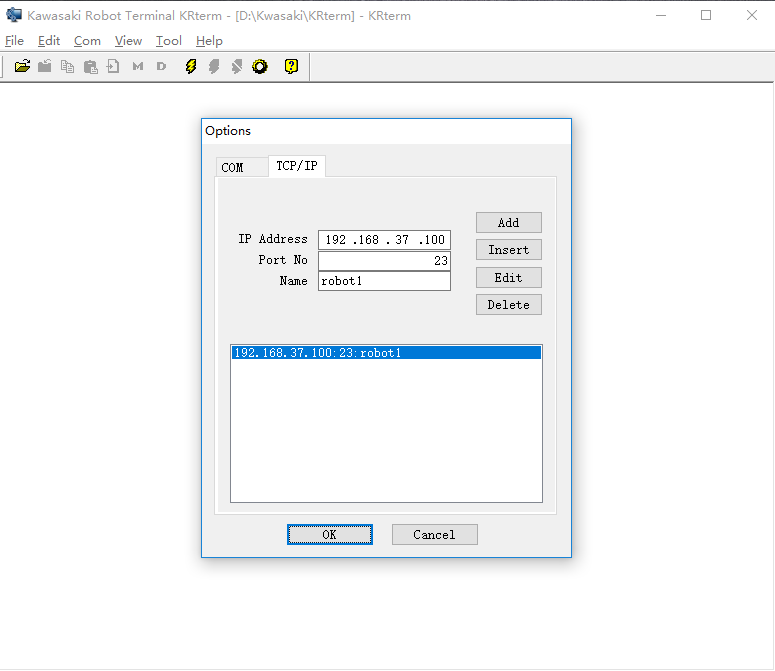
启动 KRterm,依次点击
Com->Options->TCP/IP, 将IP设为和机械臂 IP 一致, 请 不要修改 Port No, 填写完后依次点击Add->Ok。
KRterm 连接 kawasaki 机械臂
点击
Com->Connect by list,选择刚刚设定的配置,接着在terminal中输入as即可登录:
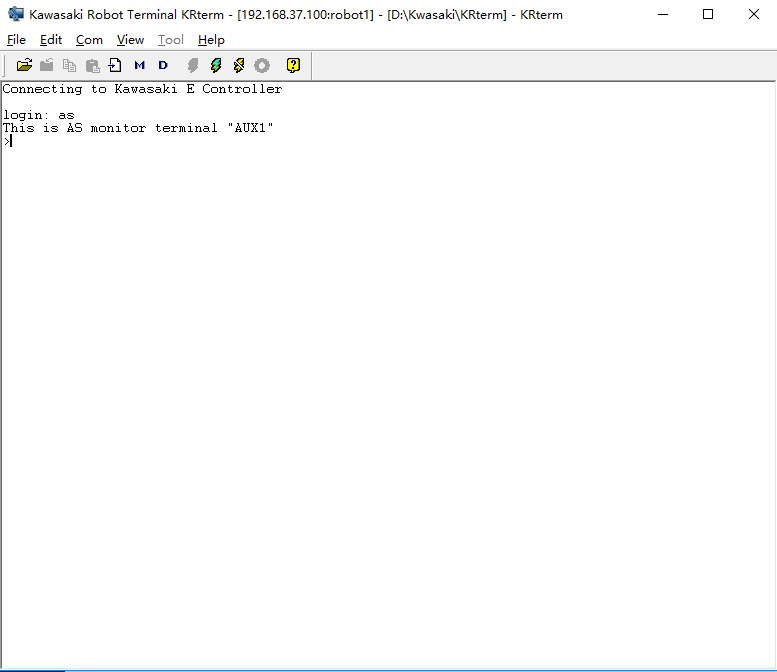
KRterm 连接 kawasaki 机械臂
在terminal中输入
load 文件路径,即可将程序载入到示教器。
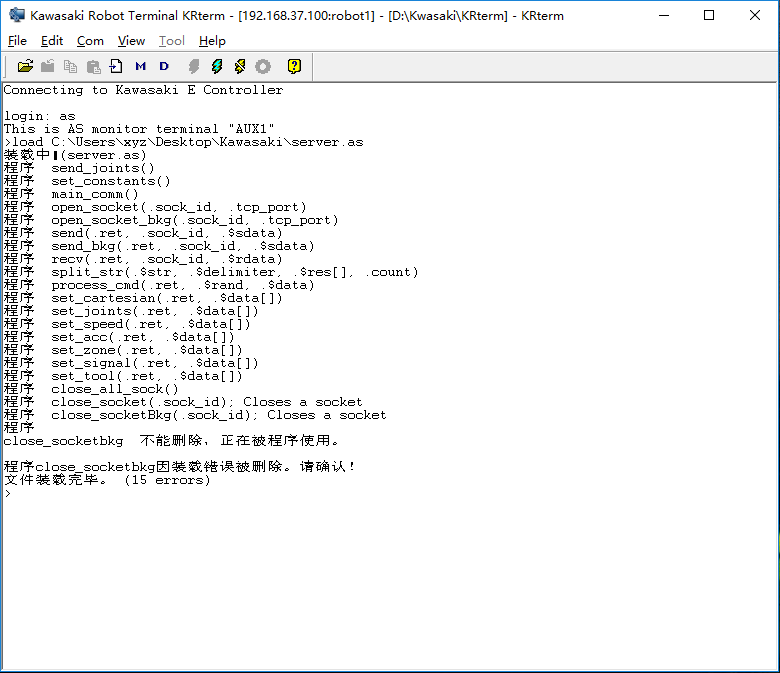
KRterm 载入 kawasaki 机械臂程序
- !注意:
文件目录中的四个文件要严格按照
xyz_lib.as->xyz_status.as->xyz_motion.as->xyz_master.as的顺序导入。