运行程序
通讯说明
工控机和 elite 机械臂的通讯方式为 TCP/IP:xyz_master, xyz_motion 和 xyz_status中工控机作为 socket server(服务端),机械臂作为 socket client(客户端)。
启动程序
无论是工控机主控还是机械臂主控,都需要先设置lua脚本,方法如下。
脚本配置方法
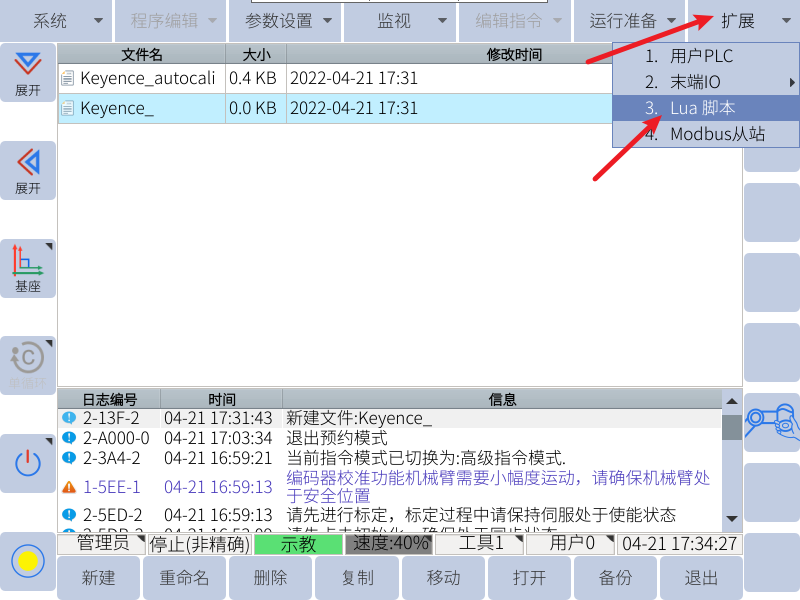
选择 扩展(用户工艺)-> LUA脚本
将脚本1, 脚本2,这两个脚本的开机运行设置为 否 ,开关设置为 打开。
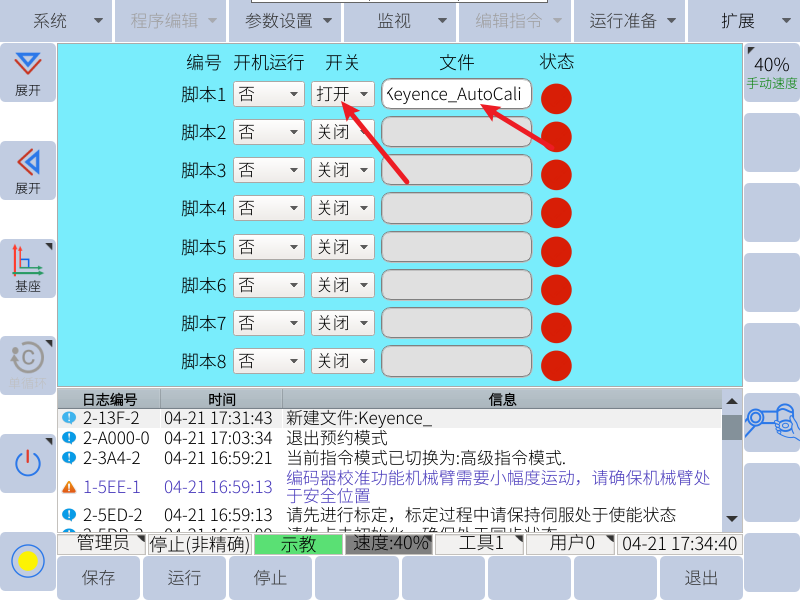
elite设置lua脚本
此外,运行前要检查示教器左下角的状态栏是否为黄色,如果是黄色,需要先按住使能按钮,再点击下图中的黄色按钮,进行自动校准,待黄色按钮变绿,方可运行程序。
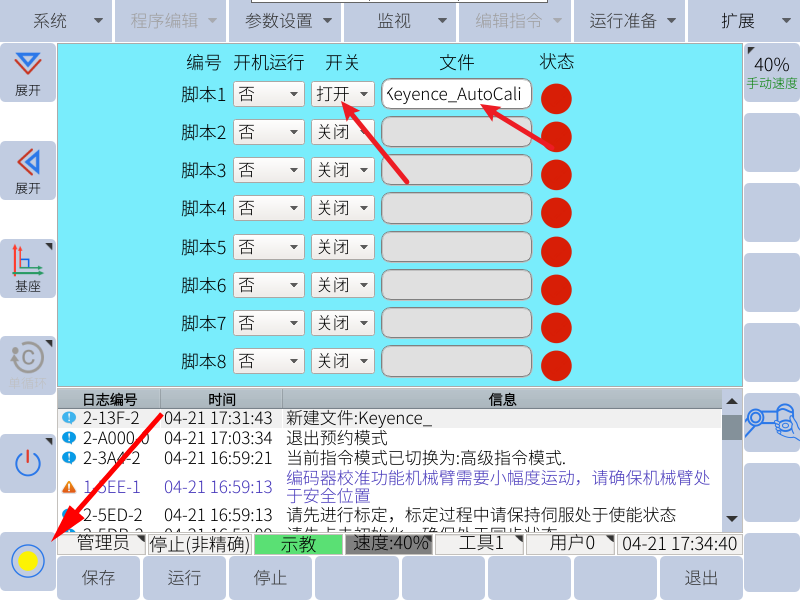
示教器自动校准
工控机主控设置
参照上述脚本设置方法,将脚本1设置为
xyz_motion.lua,脚本2设置为xyz_status.lua。示教器中选择
xyz_motion.jbi运行即可,每次运行程序前,要运行的LUA脚本状态需要设置为停止。运行方法:在示教器主界面找到
xyz_motion.jbi, 然后转动示教器右上角的钥匙至循环模式,此时程序指针会自动回到改程序的第一行,再点击示教器右下角的黄色伺服按钮,最后点击示教器右下角的绿色运行按钮即可。
机械臂主控设置
参照上述脚本设置方法,将脚本1设置为
xyz_master.lua,脚本2设置为xyz_status.lua。依据项目实际需求,示教器中选择对应的模板jbi程序(例如
cart_move_basic.jbi)运行即可, 每次运行程序时,要运行LUA脚本状态需要设置为停止。运行方法同工控机主控模式。