工作空间标定
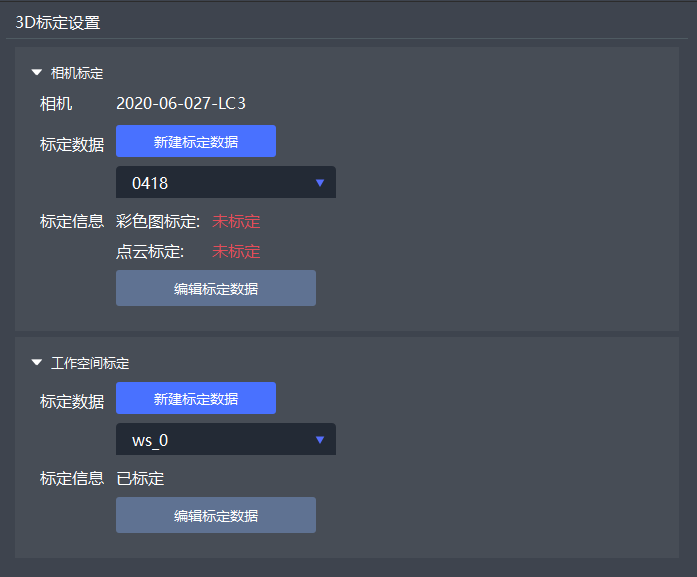
相机标定完成后,还需要标定视觉工作空间。打开 加载标定信息 模块后,在界面最右边 3D标定设置 区域中 工作空间标定 页签下,单击 新建标定数据 开始标定,如下图。
工作空间的标定有三种方式:3D视图拖拽、角落点触碰式和边缘点触碰式。
3D拖拽
3D视图拖拽是指在预览视图当中,将料筐模型拖拽至与料筐点云重合的位置,从而标定工作空间。该方式适用于3D相机。
在 工作空间尺寸 区域中设置工作空间的长、宽、高,用户需要测量工作空间实际的长宽高数据,然后输入真实的工作空间尺寸。

在预览窗口移动工作空间,使之与点云中的料筐吻合。
依次单击 完成,即可完成标定。
角落点触碰式
该方式使用探针触碰工作空间(如料筐)上表面的三个角点,通过这三个点的位置标定整个工作空间。该方式适用于2D相机。

设置法兰坐标系下的工具位姿,工具(即探针)和法兰位置保持相对固定。
在 工作空间尺寸 区域中设置工作空间的长、宽、高,用户需要测量工作空间实际的长宽高数据,然后输入真实的工作空间尺寸。
移动机械臂,使探针的尖端分别触碰工作空间的三个角点,单击 标定 分别得到三个点的位置数据。
系统计算得到工作空间位姿,单击 完成,即可完成标定。
边缘点触碰式
该方式使用探针触碰工作空间(如料筐)上表面的五个点,其中工作空间的三条边上各取一个点,另外一条边上取两个点,通过这五个点的位置标定整个工作空间。该方式适用于2D相机。

设置法兰坐标系下的工具位姿,工具(即探针)和法兰位置保持相对固定。
在 工作空间尺寸 区域中设置工作空间的长、宽、高,用户需要测量工作空间实际的长宽高数据,然后输入真实的工作空间尺寸。
移动机械臂,使探针的尖端分别触碰工作空间的五个点,三条边上各取一个点,另一条边上取两个点,单击 标定 分别得到五个点的位置数据。
系统计算得到工作空间位姿,单击 完成,即可完成标定。