手眼标定
Max提供的手眼标定方式有两种,一种是相机在机械臂上,另一种是相机固定在场景。
相机在机械臂上,即眼在手上(eye on hand)。在这种标定方式中,相机被固定于机械臂末端法兰上,相机与机械臂法兰的相对位置是固定的。
相机固定在场景,即眼在手外(eye to hand)。在这种标定方式中,相机被安装在机械臂外的一个固定位置,或者安装在滑轨上,可在若干个固定位置之间移动。
下面将详细介绍两种标定方法在Max中的使用步骤。
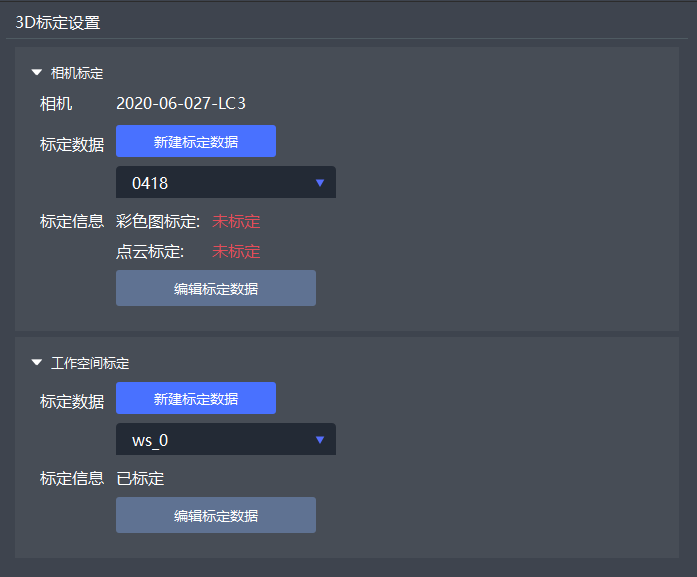
在 视觉 界面中打开 加载标定信息 模块,在界面最右边 3D标定设置 区域中 相机标定 页签下,单击 新建标定数据 开始标定,如下图。
设置标定方法。

设置 应用场景 ,根据实际情况选择 眼在手上 或 眼在手外。
设置 标定算法,根据实际情况可选择 标准、触碰 或 间接。本章以标准标定算法为例。
选择 操作方式,根据实际情况选择 自动 或 手动,一般推荐自动标定的方式,方便快捷。
根据实际情况设置机械臂轴数。若选择4轴机械臂则还需设置 法兰盘Z轴偏置 ,该值需手工测量,然后在界面中设置。
标定设置。

单击 选择 ,根据需要选择标定板类型,再单击 确认并返回 即可。

根据实际情况以及工作空间大小设置旋转角度,一般建议为10~30度。该参数仅自动标定需要设置。
根据实际需求设置标定延迟时间,一般设置1~3秒即可。
设置 X/Y方向移动距离 和 Z方向移动距离,设置每次在各方向上的移动距离。
提示
X/Y方向移动距离 仅针对四轴机械臂,六轴机械臂不需要配置该参数。
单击 注册,可实时读取当前机械臂末端位姿,完成位姿注册,初始位姿会在下面显示。也可单击页签右下角的 移动机械臂到初始位姿,使机械臂回归到初始位姿。
提示
注册前请先连接机械臂,否则无法读取机械臂位姿。
单击 生成标定位姿 开始自动标定。
标定数据。
在 标定数据 页签中单击 开始,机械臂会根据设定旋转角、标定延迟等参数自动完成标定,并在进度条实时显示标定进度。
提示
若选择手动的标定方式,则需要使用示教器将机械臂移到不同的位置,并手动输入相应点的位姿数据。每输入一组数据单击一次 标定,进度条会实时显示标定进度,直到完成所有数据的输入。
若对标定过程不满意,可单击 重置标定进度,重新开始标定。当有效点达到8个时,即可计算标定结果。

单击 计算标定结果,则显示相机位姿、角度、标定误差等信息。

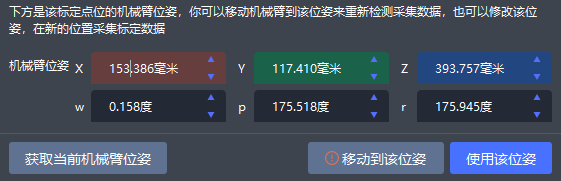
在“标定数据”表格中会显示标定的点的误差,若误差较大可以单击 编辑,弹出 编辑标定数据 窗口,更新位姿数据减小误差。然后单击 使用该位姿,窗口关闭,系统会重新计算并更新标定结果。
单击 下一步 开始检查标定结果。
检查标定结果。
在 标定结果 页签中查看相机位姿、角度、标定误差等信息。同时单击问号图标,可查看标定结果的解释说明。

单击 可视化结果,在彩色图中观察投影点重合度,重合度高则标定结果好。检查结果时,按【Ctrl】键滑动鼠标滚轮,可放大图片。

在 点云标定 页签中选择 点云标定,开始点云标定的步骤。若无需标定点云,则单击 完成 即可结束相机标定。
提示
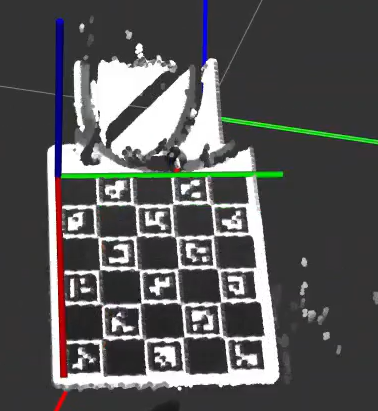
在标定的图像结果中,红色点是视觉识别得到的点,绿色点是计算出来的理论值,两种点重合的部分显示为黄色。重合度越高、黄色部分越大表示标定结果越好。
在3D视图中,当坐标系原点在标定板顶点,X轴和Y轴分别与该顶点两条邻边重合,且Z轴垂直于标定板平面向上时,标定结果较好。
点云标定。

点云标定的参数设置及方法请参照前文步骤2~4。进行点云标定时,根据实际情况设置 X/Y方向移动距离 和 Z方向移动距离,其余步骤和前面相同。
提示
点云标定用于校准相机深度(z)方向上的精度,在能自动标定的情况下,一定要选择点云标定。
单击 下一步,检查点云标定结果。
检查点云标定结果。
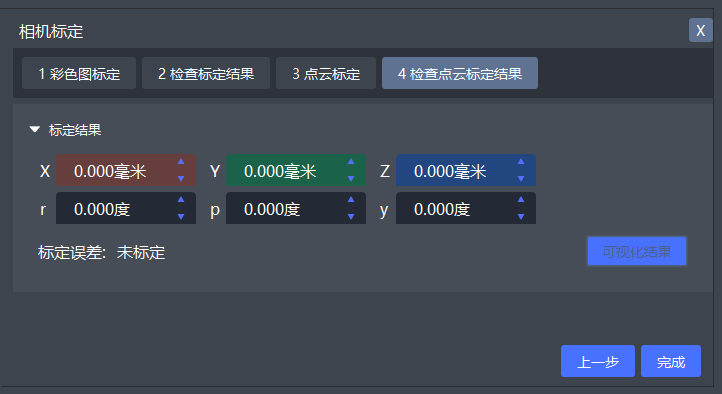
在 标定结果 页签中查看相机位姿、角度、标定误差等信息。
单击 可视化结果,可在彩色图中观察投影点重合度,重合度越高则标定结果越好。
单击 完成 结束相机标定。
手眼标定完成后还需要进行工作空间标定,请参见 工作空间标定。