安装驱动
rokae 机械臂驱动文件列表
rokae机械臂的用于烧录的驱动文件只有一个压缩文件:xyz.zip
获取权限
在对机器人做出任何修改时会遇到权限不足的情况,按以下步骤获取权限
点击图中的设置按钮,选择 设置 -> 用户组, 然后选择用户组为 God , 输入默认密码 123456,即可。
设定机械臂 IP
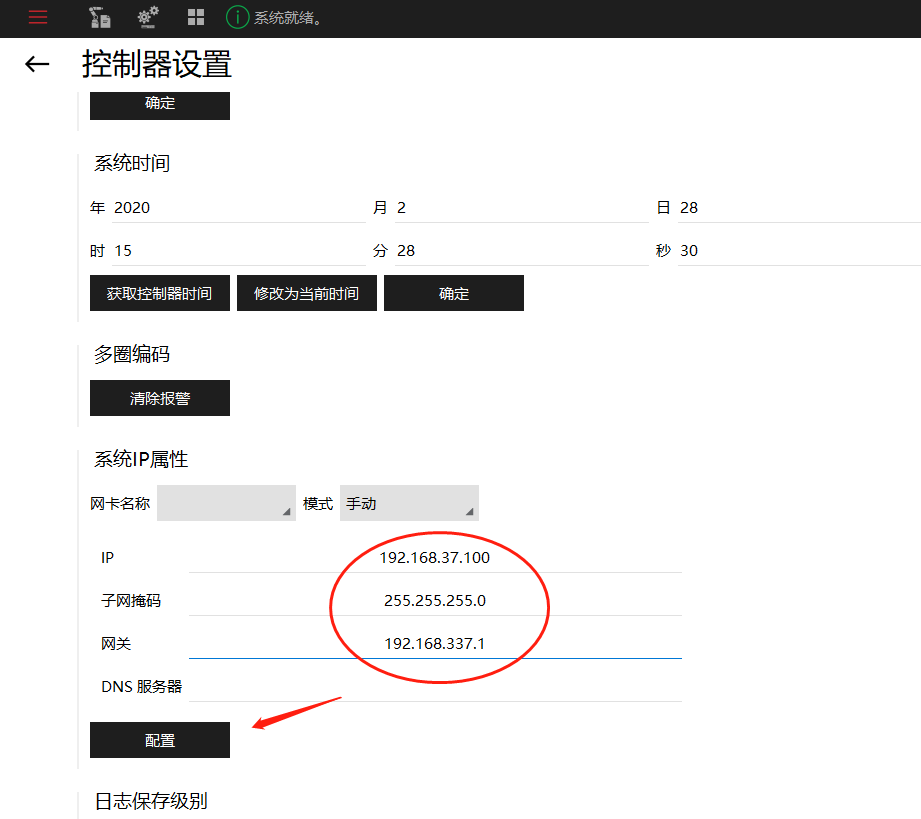
示教器右下角点选机器人名称,进入控制器设置界面,向下拖动找到系统IP属性,设置为:
“IP”设置为:192.168.37.100
“子网掩码”设置为:255.255.255.0
“网关”设置为:192.168.37.1
网络设置完成后重启机械臂生效。
使用U盘导入程序
将 MAX 安装目录下的 share/robot_code中 rokae 的机械臂程序文件 xyz.zip 拷入U盘,插入示教器右上方的USB口。
在示教器上,按照图片选择,点击圆圈中的图标,再点击当前的工程名称,即可进入工程配置界面,见下图。
在示教器上,点击上图中的箭头指向的按钮,即可进入烧录程序界面,在箭头指向的地方选择U盘中存放程序的路径, 即可导入。
回到配置工程界面后选取刚刚导入的xyz工程,点击重新加载,即可将当前工程设置为烧录的程序。
至此,烧录程序完成。