软件概述
基础操作
典型场景
附录
工控机和 三菱 机械臂的通讯方式为 socket。
工控机作为 socket server(服务端),机械臂作为 socket client(客户端)。
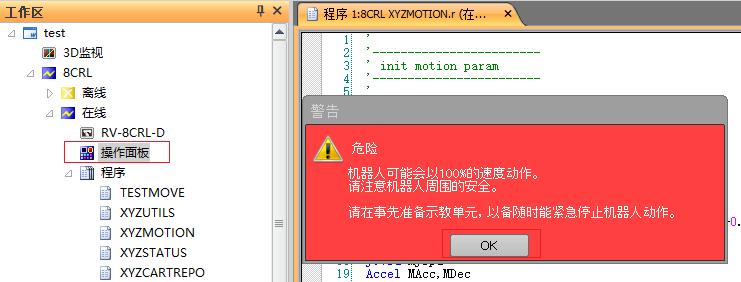
机器人切换到自动模式
启动操作面板:工作区 -> 对应的项目 -> 对应的工程名 -> 在线 -> 操作面板 -> 弹窗选择OK
在线
操作面板
启动操作面板
操作面板:加载XYZMOTION
选择机器人程序
工控机启动 robot_driver_node 后
操作面板:设置运行速度 -> 伺服ON -> 开始
伺服ON
开始
运行程序
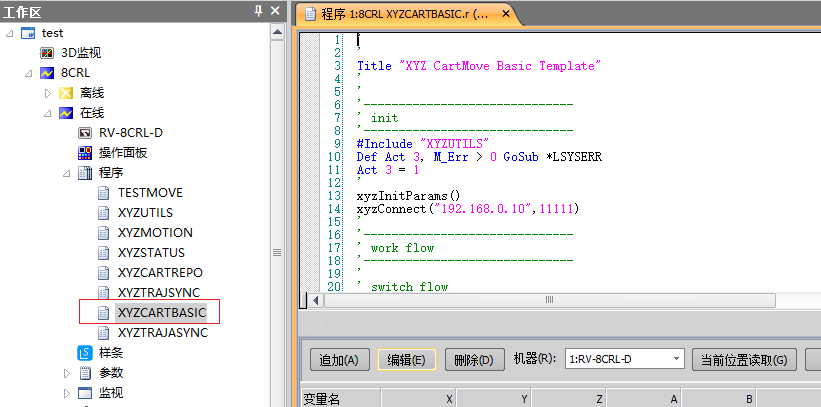
参考下位机模板程序,根据项目运行逻辑,修改下位机运行程序:工作区 -> 对应的项目 -> 对应的工程名 -> 在线 -> 程序 -> 双击模板程序,如 XYACARTBASIC -> 弹窗选择OK -> 修改
程序
XYACARTBASIC
修改模板程序
加载运行程序
工控机启动 robot_server