运行程序
通讯说明
工控机和 inovance 控制器的通讯方式为 socket:工控机作为 socket server(服务端),机械臂作为 socket client(客户端)。
机械臂主控,使用的是第一个 socket 连接,代码中对应的是2,即代码中的 Open Socket(“192.168.37.101”,11111,2,Single, LB[1]) 中的2.
工控机主控,使用的是第二个和第三个 socket 连接,代码中对应的是端口3和端口4。
注:按照汇川控制器的设定,端口 2-5 为自由分配端口。
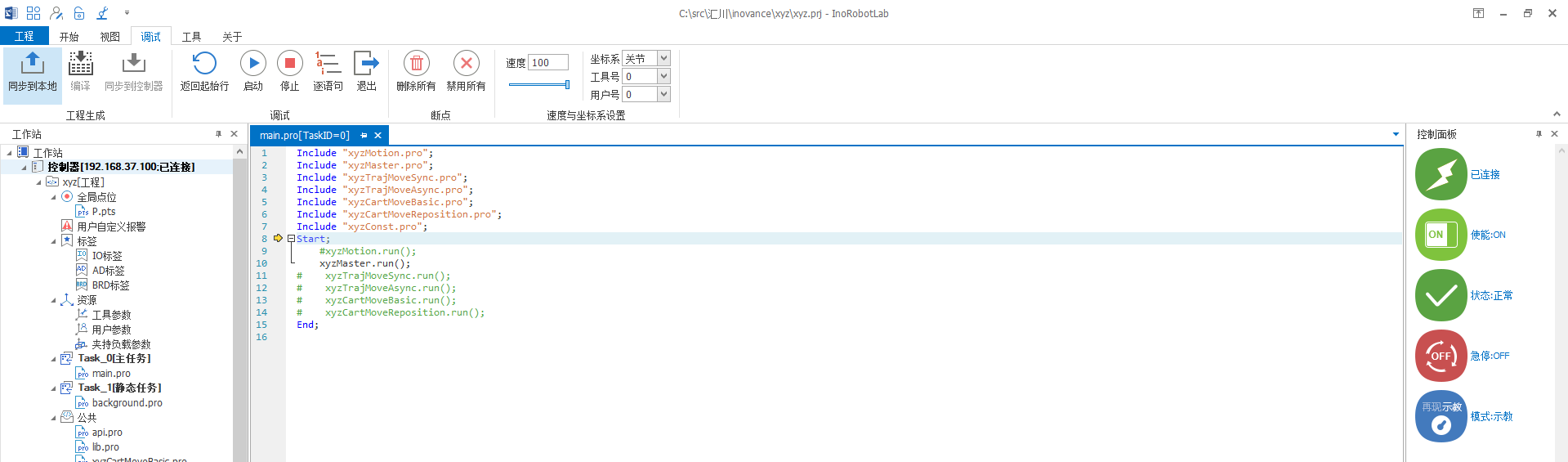
InoRobotLab 运行程序(目前推荐使用)
示教器运行程序
机械臂主控运行
打开 main 函数,在修改机械臂主控模板程序后,反注释需要运行的机械臂主控程序,注释不使用的程序。
按下示教器模式切换按钮。切换为再现模式,右上角如有!注意清楚错误,随后按下启动按钮即可运行。
工控机主控运行
修改 main.pro, 反注释 xyzMotion.run(),注释其他行。
按下示教器模式切换按钮。切换为再现模式,右上角如有!注意清楚错误,随后按下启动按钮即可运行。