任务
任务部分利用视觉部分的计算结果和运动部分的运动规划,控制整个项目的流程运行。本章节将详细介绍任务部分的配置。
在 任务 中导入纸箱单码的模板,请参见 流图配置。
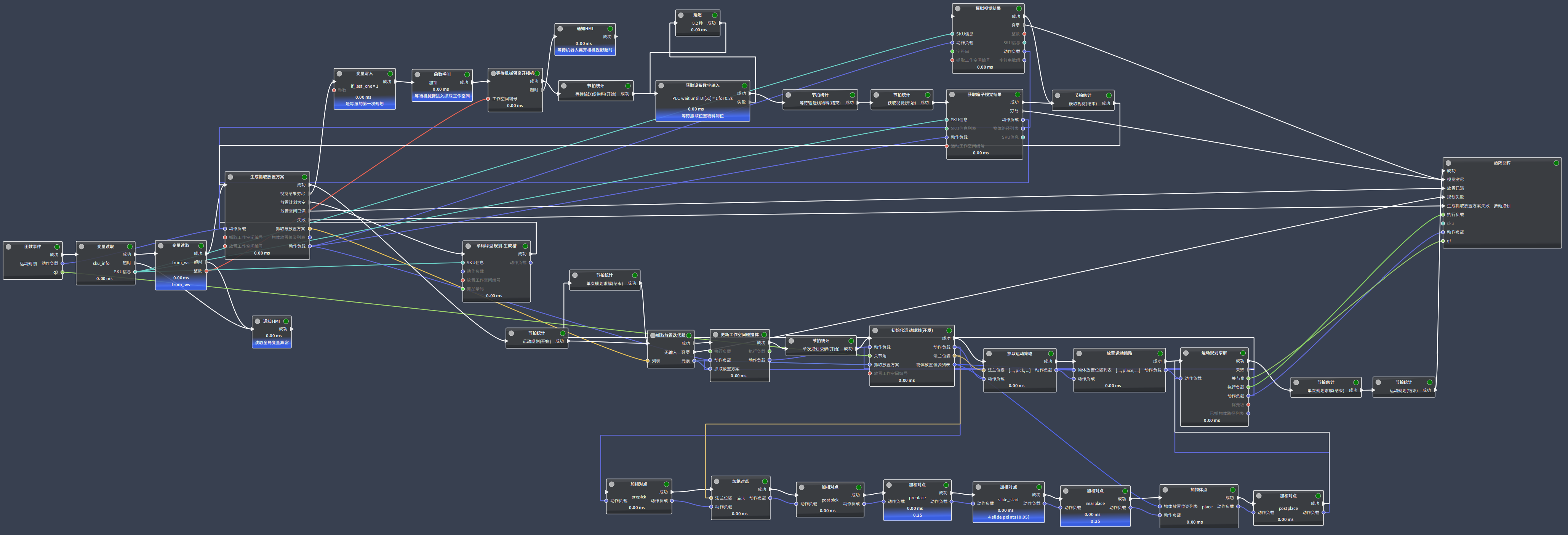
添加好基础模板之后,用户可根据需求添加或修改模块。以纸箱单码为例,任务流图主要分为五个部分:主程序、流图初始化、任务初始化、运动规划和运动执行。主程序控制整体流程,运行过程中会调用另外四个部分执行相应功能。下面依次介绍这五个部分。
主程序
主程序控制整个任务流程,主程序配置好之后如下图所示。

下面详细介绍主程序的配置步骤。
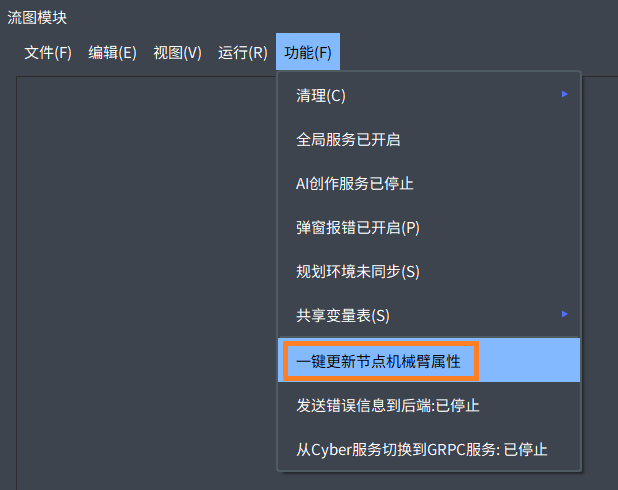
在任务流图模块当中选择“功能 > 一键更新节点机械臂属性”,系统自动根据当前设置更新机械臂路径。也可在模块的属性中设置机械臂路径。
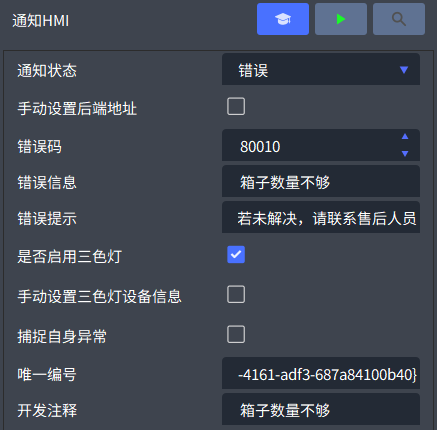
单击 通知HMI 模块,在右侧 属性 页签中根据需要设置错误信息,包括错误码、错误信息、错误提示等。
流图初始化
流图初始化主要设置一些流图运行过程中的必要信息,配置好之后如下图所示。

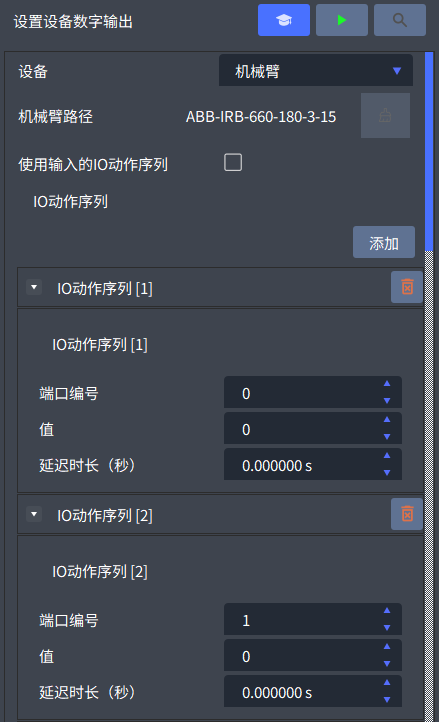
该部分主要设置“设置设备数字输出”模块,设定IO动作序列。单击该模块,在右侧 属性 页签中设置设备类型、相应的端口编号和值等,如下图所示。
提示
单击Max右上角的 虚拟示教器,在 I/O控制 页签根据机械臂实际情况设置数字输出端口号。端口名称可自行定义,然后单击 确认。在 设置设备数字输出 模块设置时,选择I/O控制里的端口即可。

任务初始化
任务初始化主要设置任务运行过程中的环境、机械臂等信息,配置好之后如下图所示。

下面详细介绍任务初始化的配置步骤。
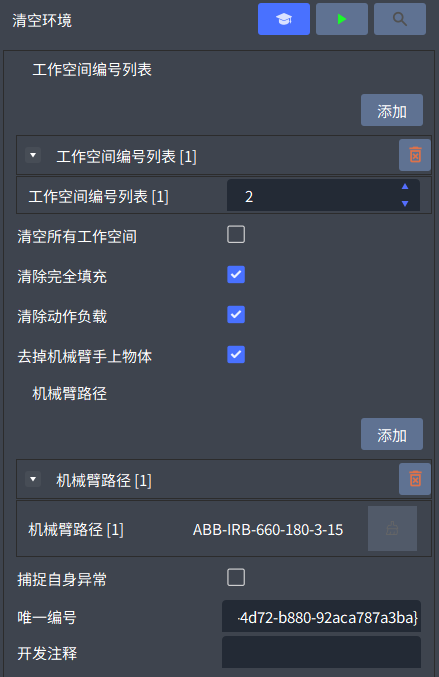
单击 清空环境 模块,在右侧 属性 页签中设置参数。特别需要注意的是“清空所有工作空间”,在纸箱单码的场景中一般不清空所有工作空间,无需勾选,此时仅清空工作空间编号列表中的工作空间。若勾选,则会清空所有工作空间,包括真实环境中的码垛位也会被清空。
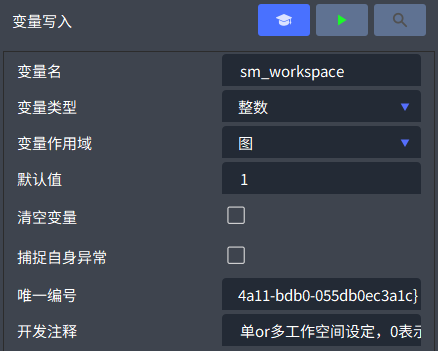
单击 变量写入 模块,并设置变量sm_workspace。“0”表示单一工作空间码垛模式,任务完成后会告知WCS让托盘离开,然后清空工作空间。“1”表示多工作空间码垛模式,当前任务完成后,机械臂回Home点继续等待任务,当托盘满垛后才清空工作空间。用户可根据实际情况设置。
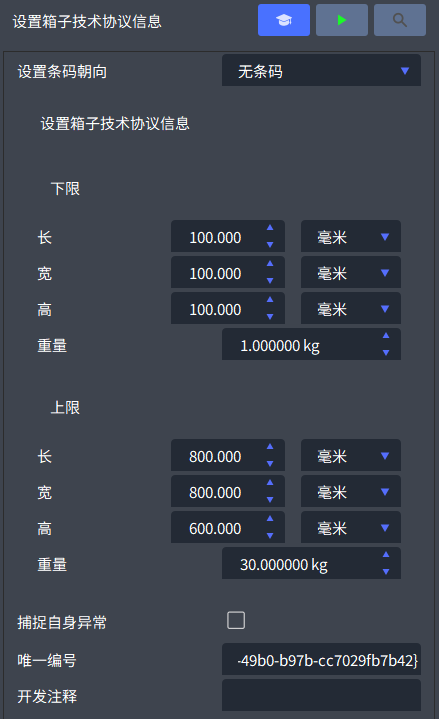
单击 设置箱子技术协议信息 模块,在右侧 属性 页签,设置条码朝向和纸箱的长、宽、搞、高、重量的上下限,根据纸箱实际情况设置即可。
单击 变量写入(is_go_weigh),在右侧 属性 页签,设置是否称重,“1”表示会对来料纸箱进行称重,“0”表示不称重,默认为0。

运动规划
运动规划阶段主要规划单码垛型、计算抓取方案并进行运动规划,配置好之后如下图所示。
下面详细介绍运动规划的配置步骤。
该部分主要设置 获取箱子视觉结果 模块,在右侧 属性 页签中设置以下参数。
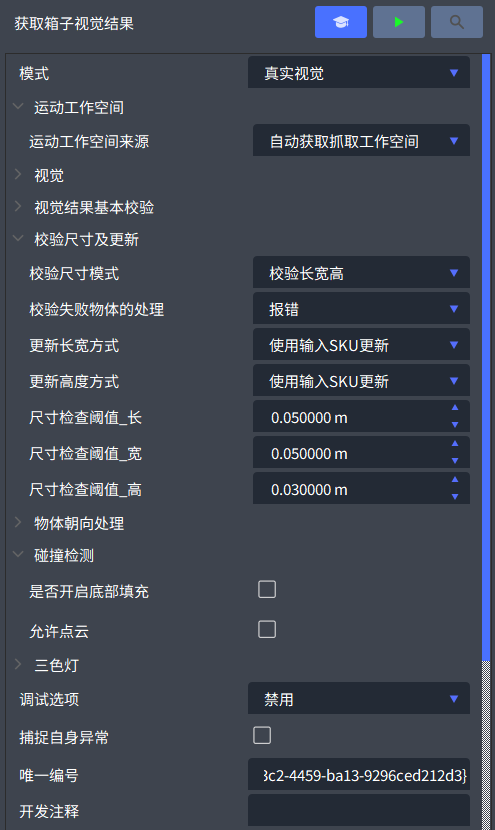
运动工作空间来源:可以选择自动获取抓取工作空间。
校验尺寸模式:对纸箱进行长宽高检验,如果尺寸信息有误,则报错。
更新长宽方式:采用“使用输入SKU更新”的方式。
更新高度方式:采用“使用输入SKU更新”的方式。
是否开启底部填充:对于输送线不需要开启。
运动执行
运动执行阶段主要负责按照既定规划执行抓放动作,配置好之后如下图所示。

该阶段无需配置模块,保持默认配置即可。