任务
设置完视觉和运动部分之后、运行任务流图之前,需要添加工件代号映射关系,以便任务流图调用视觉和运动设置的工件、视觉服务编号、抓取处理流程等内容,具体步骤如下。
工件代号映射表
单击Max右上角 映射表与通信协议,在弹出的 映射表与通信协议 窗口选择 “工件代号映射表 > 坐标移动”页签。
在 示例-拆麻袋 项目中已配置好两个视觉服务的映射关系,可根据实际项目修改键、值等。对于新建的空白项目,详细请参考2D坐标移动场景中任务章节的 工件代号映射表。设置好的映射表如下图。

任务流图
在 示例-拆麻袋 项目中已经配置好任务流图,用户可根据实际需求修改。如果需要新建任务流图,则设置完工件代号映射表之后,在 任务 中导入2D/3D坐标移动的基础模板,请参见 流图配置。任务流图的设置分为工控机主控和机械臂主控两种方式。
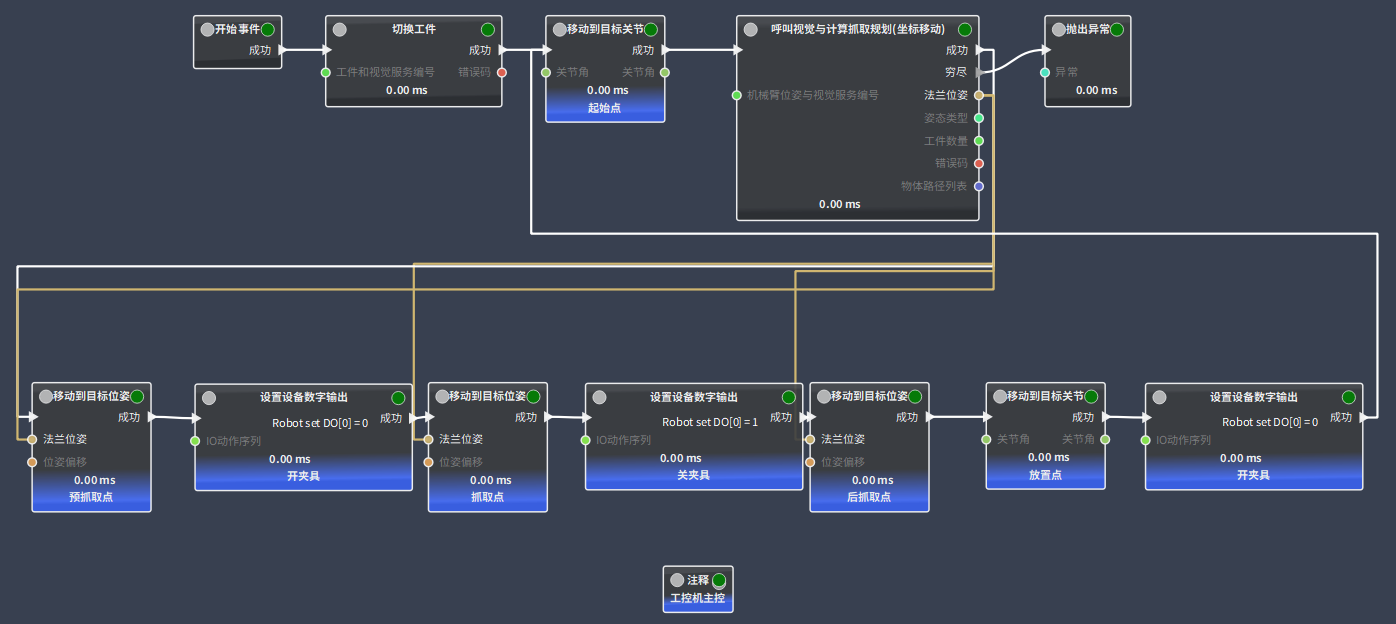
工控机主控
示例项目中已配置好工控机主控的任务流图,如下图所示。用户可根据需求添加或修改模块,具体方法请参考2D坐标移动场景中任务章节的 工控机主控。
配置完成后单击任务流图左上角的  ,开始执行整个抓取流程。
,开始执行整个抓取流程。
机械臂主控
示例项目中已配置好机械臂主控的任务流图,如下图所示。用户可根据需求添加或修改模块,具体方法请参考2D坐标移动场景中任务章节的 机械臂主控”。
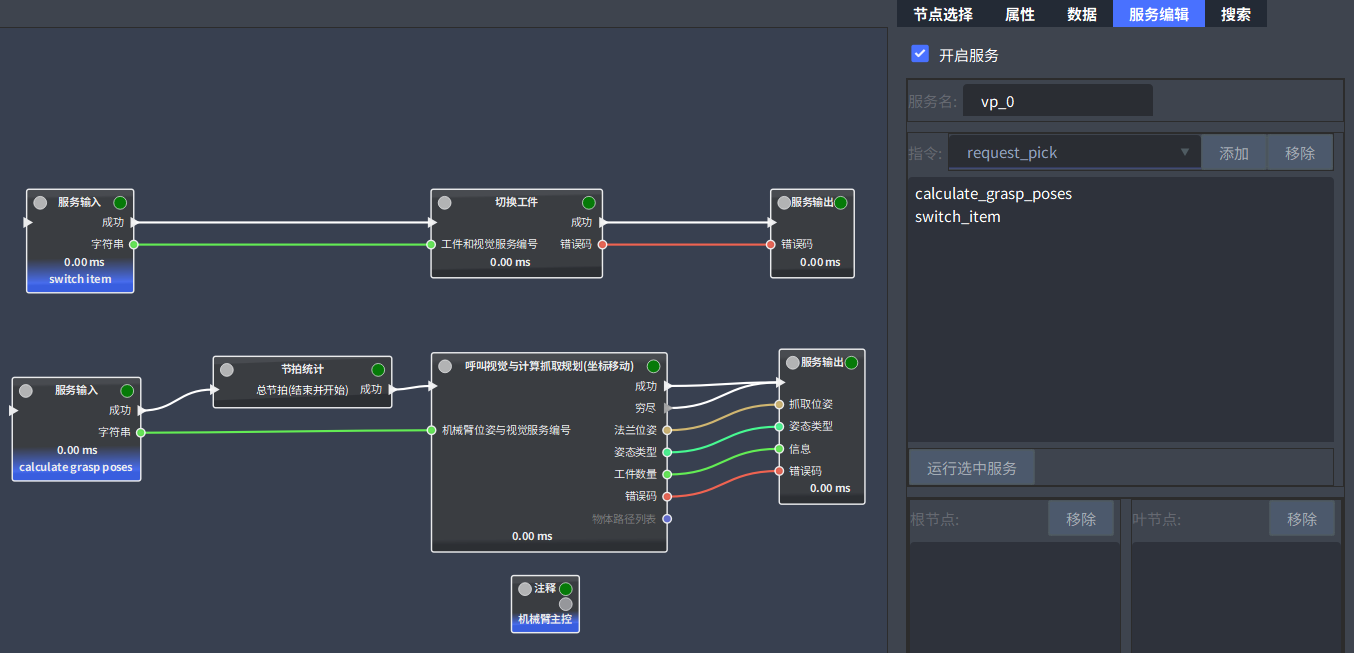
机械臂主控模式下,KUKA机械臂案例和示例代码可参考 案例/模板说明,其他品牌的案例和代码可在 安装机械臂驱动 中选择相应的品牌查看。
在Max中,单击右上方 映射表与通信协议,在弹出窗口的 机械臂基础设置 页签下,勾选 开启 打开测试模式。此时右侧会出现 打开文件 和
 。单击 打开文件 可查看通信指令的yml文件,单击 可在浏览器中打开 机械臂主控通讯协议 v2 页面,并查看机械臂主控通信协议、指令等的内容。
。单击 打开文件 可查看通信指令的yml文件,单击 可在浏览器中打开 机械臂主控通讯协议 v2 页面,并查看机械臂主控通信协议、指令等的内容。
