设置运动路径
机械臂运动路径一般涉及起始点、抓取点、放置点以及相对于抓取点、放置点的点位,起始点通过任务流图中的 移动到目标关节 设置,其余点位在 运动页签 下的 路径 面板设置。
以下为添加运动规划的简单示例,不同应用场景下不同项目添加的点位及具体设置应以项目实际情况为准。
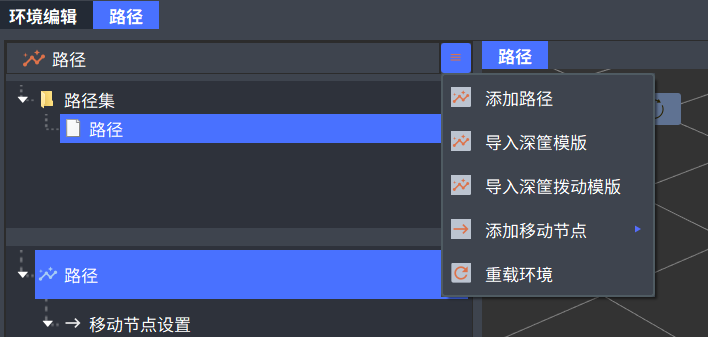
在 运动 页签下的 路径 面板,单击右上角
 ,选择 添加路径。
,选择 添加路径。提示
也可选择导入已有模板,比如深筐模板与深筐拨动模板,模板中包含预置路径节点。
在右侧参数设置栏 抓取配置 下方,设置抓取移动涉及的工作空间、工作流程、视觉服务编号,并根据需要在 放置配置 下方设置放置相关参数。

右键单击 路径 面板左下角 路径,选择 “添加移动节点 > 抓取移动节点”。单击左下角新生成的 抓取移动节点,在右侧参数设置栏选择运动类型。运动类型指前一个点到当前点的运动类型。
右键单击 路径 面板左下角 抓取移动节点,选择 “添加移动节点在前 > 相对移动节点”。单击左下角新生成的 相对移动节点,在右侧参数设置栏将 相对节点 设置为 抓取移动节点,单击 目标点 右侧 添加,设置相对位姿,单击 确定。
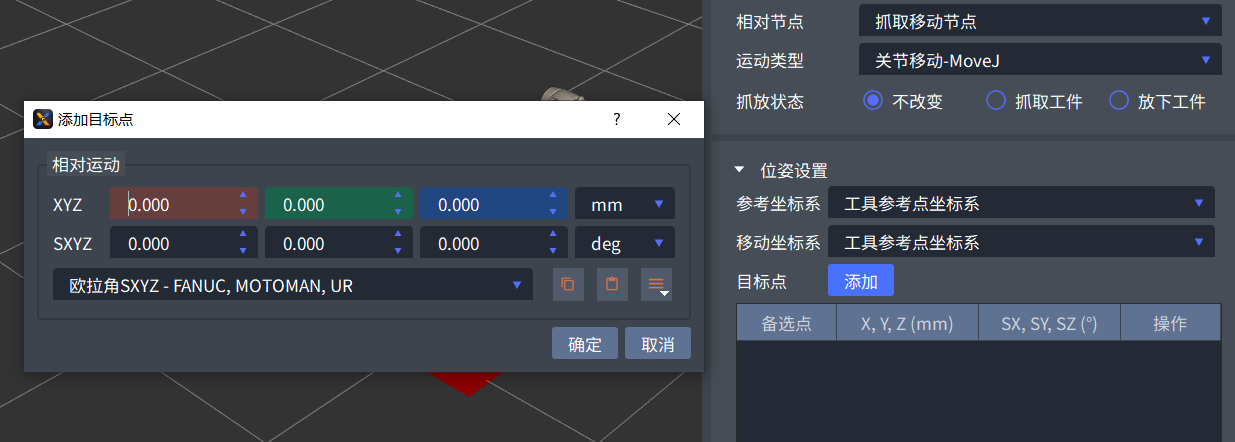
右键单击 路径 面板左下角 抓取移动节点,选择 “添加移动节点在后 > 相对移动节点”,再生成一个相对移动节点,代表机械臂在抓取工件后相对移动点位。单击该节点,将相对节点设置为 抓取移动节点,再添加目标点并设置相对位姿。
右键单击上一步生成的 相对移动节点,选择 “添加移动节点在后 > 绝对移动节点”,用该节点表示放置点位。单击左下角新生成的 绝对移动节点,在右侧参数设置栏将 抓放状态 设置为 放下工件,设置物体掉落高度,单击 目标点 右侧 添加,添加放置点的机械臂关节角。

确认各点位的碰撞检测设置。单击各节点,在右侧参数设置栏 碰撞检测设置 下方查看碰撞检测参数。
检查目标点位碰撞:检测该点是否发生碰撞。
检查插值点位碰撞:检测从上一个点到该点之间插值点位是否发生碰撞。
提示
单击 高级参数 右侧
 ,可查看并设置碰撞检测的高级参数。
,可查看并设置碰撞检测的高级参数。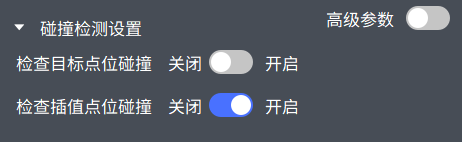
右键单击中间预览窗口上方 路径 页签,选择 保存。