安装驱动
otc 机械臂驱动文件列表
- – otc
MZ04-01-A.000(工控机主控前台源程序)
MZ04-01-A.001(机械臂主控前台CartMove基础模板源程序)
MZ04-01-A.002(机械臂主控前台CartMove二次定位模板源程序)
MZ04-01-A.100(机械臂主控测试源程序,可以不导入)
PUBLIC.INC(全局变量定义区)
USERTASK-A.100(工控机主控用户任务源程序)
USERTASK-A.200(工控机主控用户任务源程序)
USERTASK-A.300(机械臂主控用户任务源程序)
VARIABLE.INC(全局变量、寄存器使用范围定义区)
设定机械臂 IP
用钥匙开关在控制柜上将机械臂切换到手动模式。
切换用户权限: 示教器
R按钮 -> 输入数字314-> 输入密码,默认密码是123456或者86055,或者咨询机械臂提供商。示教器上执行:
常数设定->通讯->以太网->TCP/IP, 按如下进行设置后 ->写入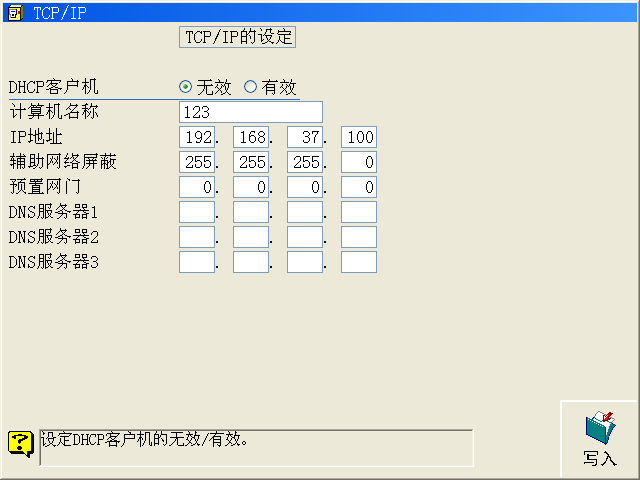
导入程序
otc机械臂程序导入有两种方法,一种是使用FD软件,一种是使用U盘。这里介绍使用U盘导入的方法。
程序文件准备:
otc机械臂程序源文件名称中的
MZ04-01是机械臂的型号,不同机械臂需要自行修改为相应的程序文件名称。确保otc机械臂程序文件尾行格式是CRLF。
U盘准备:
确保U盘被格式为为
FAT32。将otc的程序文件拷贝到U盘根目录下,其中的
MZ04-01-A.100可以导入,也可以不导入。
导入并编译:
机械臂切换到手动档,并切换用户权限
将U盘插入到机械臂示教器USB接口
示教器上执行:
维修->文件操作->拷贝-> 选择U盘中所有程序文件并拷贝到/WORK/PROGRAM下: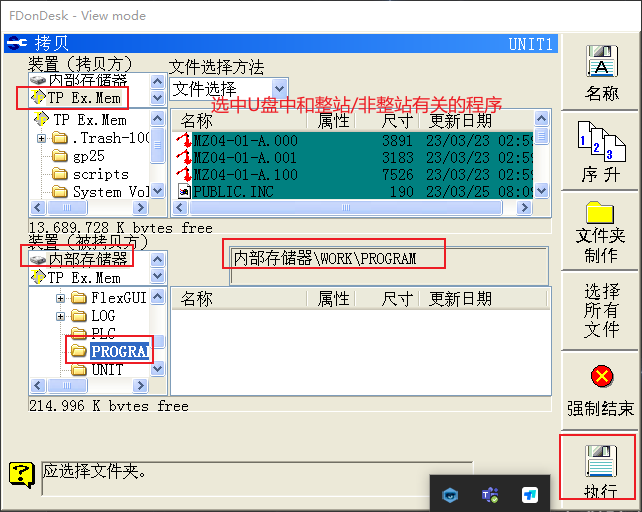
重启机械臂!!!否则后续程序编译会有问题!
因为
PUBLIC.INC需要重启后会才能自动编译成PUBLIC.DAT
进行程序编译:
维修->程序转换->语言转换-> 先对USERTASK-A.100进行编译,方法如下:
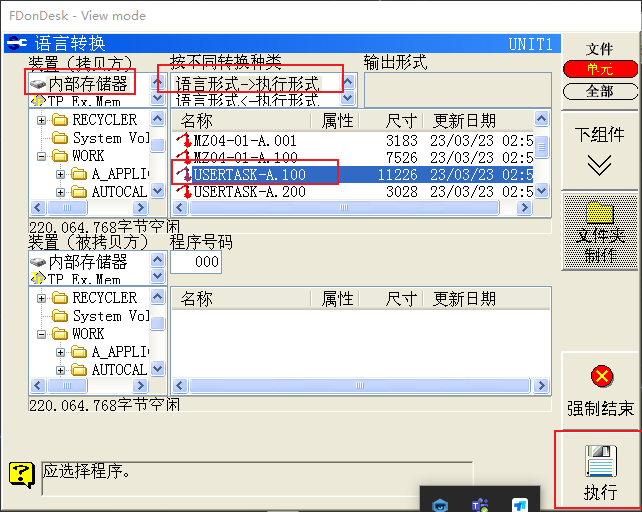
注意编译有顺序性,必须先编译后台程序
同样的编译方法,按 顺序 对剩下的程序进行编译:
USERTASK-A.200,USERTASK-A.300,MZ04-01-A.000,MZ04-01-A.001,MZ04-01-A.002,MZ04-01-A.100(这是测试程序,可不编译)。