运行程序
通讯说明
工控机和 otc 机械臂的通讯方式为 socket:工控机作为 socket server(服务端),机械臂作为 socket client(客户端)。
启动程序
运行机械臂主控
用户根据项目实际需要,参考机械臂主控模板程序 MZ04-01-A.001, MZ04-01-A.002 等,修改生成自己的程序,然后导入到机械臂后重新编译、加载并运行。
注:也可以在示教器上直接修改程序内容。
运行步骤:
切换到手动档,并切换用户权限
停止后台程序,并设置后台程序的优先级别
示教器上打开 用户任务监视器 窗口:
维修->监视器2(或其他监视器) ->用户任务->用户任务监视器
如果是第一次运行,则此时看不到如上所述的后台任务
100,200,300,这时需要加载这3个后台任务,方法为:将光标移动到
用户任务监视器任意处,然后按示教器上的编辑按钮,进入到编辑模式:
然后按如下方法添加3个后台任务并设定优先级别为6 ->
写入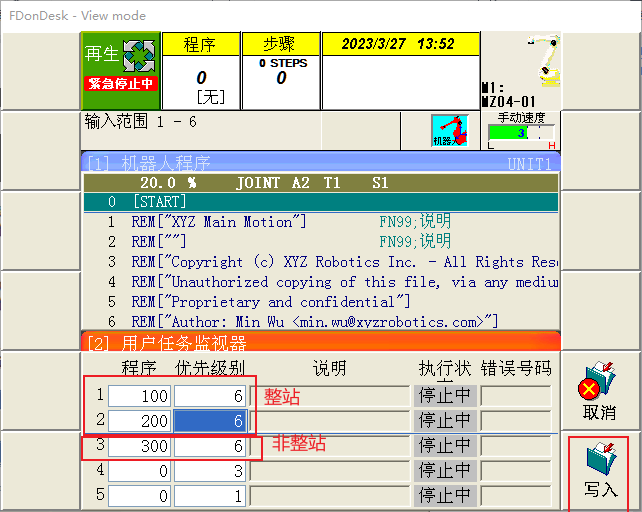
如果
执行状态那一列有正在启动中的后台程序,则需要先停止这些后台任务,方法为:移动光标到 启动中 的后台程序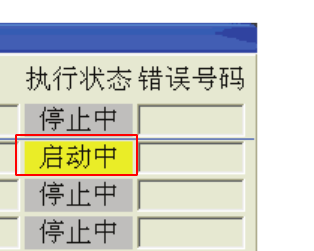
然后按示教器的
ENABLE+OFF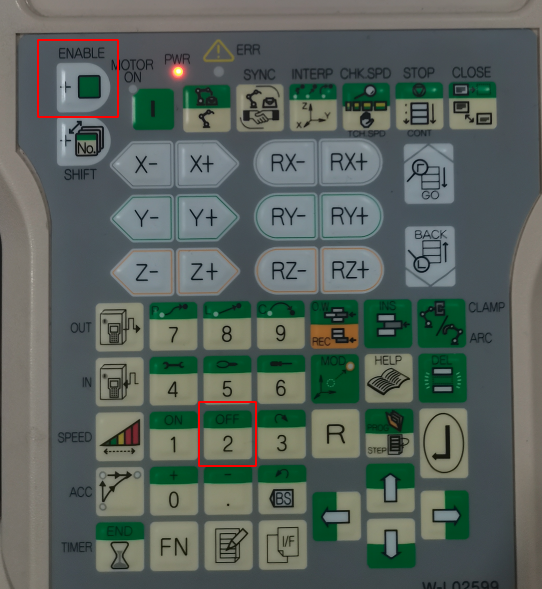
加载自己的机械臂程序,如
001: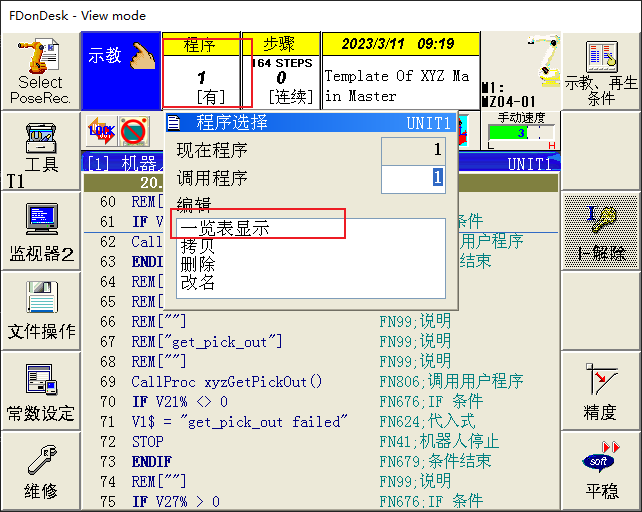
切换到自动档
上使能:同时按住示教器左上方的的
ENABLE+MOTOR ON运行程序:同时按住示教器的
ENABLE+SHIFT+GO
运行工控机主控
用户根据项目实际使用的机械臂修改工控机主控前台程序名 MZ04-01-A.000 ,然后导入到机械臂后重新编译并加载并运行。
运行步骤:
方法同机械臂主控的运行步骤,每次执行前需要确认后台程序优先级为6并停止正在运行的后台程序,然后前台程序为 000