运行程序
通讯说明
工控机和 kuka 机械臂的通讯方式为 socket:工控机作为 socket server(服务端),机械臂作为 socket client(客户端)。
机械臂上电
机械臂顶部菜单栏第二个应该为
|,表示已上电。若为
O,则需要点击O,点击驱动装置|。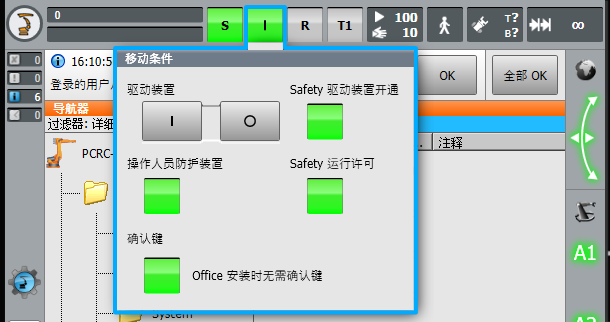
- width
300px
- align
center
kuka 机械臂上电
检查后台程序 sps.sub 是否正常
进入 管理员 模式,选择顶部菜单栏 “ S ”,如果没有启动,点击
选择/启动。如果机械臂发生意外停止,错误栏的错误点击了 OK 之后,仍然连接有问题,此时需要
取消选择,再点击选择/启动。
启动工控机主控程序
转动示教器档位切换,点击
AUT后,旋回。选中 xyz_robotics 文件夹下的 xyz_motion, 点击底部菜单栏的
选定。工控机启动 robot_driver_node 后, 按动示教器左侧实体按键:
|>运行按钮,需按动两次。
机械臂主控运行
转动示教器档位切换,点击
AUT后,旋回。选中 xyz_robotics 文件夹下的 xyz_CartMove_templat等修改好的程序, 点击底部菜单栏的
选定。工控机启动 robot_server 后, 按动示教器左侧实体按键:
|>运行按钮。
如果机械臂运行中发生意外停止,切回 T1 模式,再点击 R -> 取消选择程序 或 程序复位。