以下收录了部分用户在使用过程中出现的问题及解决方式,如果您在软件使用过程中还遇到了其他未能解决的问题,还可以前往【问答中心】的CSC MAX板块搜索相关问题或发起新的提问。
1. 什么是有效的文件上传类型?
在0.5.0版本中,我们引入了视觉日志文件格式的校验规则。视觉日志文件即下面示例中以 20231201 日期开头的目录下的文件,也叫 vision_log 。
在0.6.0版本中,视觉日志部分新增了 record 文件类型的校验规则。
在0.7.0版本中,视觉日志部分新增了 lidar 文件类型的校验规则,并同时新增了多种其他类型日志的校验规则。除了已有的 vision_log ,其他还有 xyz_arg_dump 、 xyz_mf_log 、 xyz_nav_stack 、 xyz_vp_log 、 xyz_cycle_log 和 xyz_video_log 六种, 这些日志统称为Max日志。
在0.8.0版本中,Max日志新增了驱动日志的校验规则,驱动日志包含 xyz_robot_driver_node 、 xyz_mobile_robot_driver_node 、 xyz_chassis 三种,它们分别是机械臂驱动日志、底盘驱动日志、控制器日志。
在0.11.0版本中,新增了 xyz_last_log 日志类型的校验规则,补充了 xyz_nav_stack/rerun 和 system_env_cache 的校验规则,其中 xyz_last_log 包含 production_log 、 collector_log 和 system_log 三种子文件夹。
以最新版为例,可上传文件格式的目录结构如下,其中省略号省略了下层目录及文件:
.
├── 20231201{{可添加带其他字符}}/
│ ├── annotation/
│ │ ├── 1700803858950_S110XM013100030_2.json
│ │ └── 1700804986431_S110XM013100033_1.json
│ ├── config/
│ │ ├── camera/
│ │ │ ├── S110XM013100030
│ │ │ │ └── 1700803858950_S110XM013100030_camera_extrinsic.yml
│ │ │ └── S110XM013100033
│ │ │ └── 1700804986431_S110XM013100033_camera_extrinsic.yml
│ │ └── workspace/
│ │ ├── S110XM013100030
│ │ │ └── 1700803858950_S110XM013100030_ws.yml
│ │ └── S110XM013100033
│ │ └── 1700804986431_S110XM013100033_ws.yml
│ ├── record/
│ │ ├── 1700804986431_1_requests.json
│ │ └── 1700804986431_1_responses.json
│ ├── debug/
│ │ ├── 1700803858950_S110XM013100030_2_viz.jpg
│ │ ├── 1700804986431_S110XM013100033_2_viz.jpg
│ │ ├── 1700804986431_S110XM013100033_{{可添加带其他字符}}.jpg
│ │ └── 1700804986431_S110XM013100033_2_viz_with_help.jpg
│ ├── S110XM013100030/
│ │ ├── 1700803858950_S110XM013100030_2_aligned_depth.png
│ │ ├── 1700803858950_S110XM013100030_2_camera.json
│ │ ├── 1700803858950_S110XM013100030_2_cloud.ply
│ │ └── 1700803858950_S110XM013100030_2_rgb.png
│ ├── lidar0/
│ │ ├── 1713868002952_lidar0_3_cloud.ply
│ │ └── 1713868002952_lidar0_3_lidar.json
│ ├── lidar1/
│ │ ├── 1713868002956_lidar1_3_cloud.ply
│ │ └── 1713868002956_lidar1_3_lidar.json
│ └── system_env_cache/
│ └── 1700803858950_S110XM013100030_local_obstacles.json
├── xyz_arg_dump/
│ ├── 2024-04-23_18-15-24-924/...
│ └── 2024-04-23_18-15-35-462/...
├── xyz_mf_log/
│ ├── 2024-04-23_18-15-24-924/...
│ └── 2024-04-23_18-15-35-462/...
├── xyz_vp_log/
│ ├── 2024-04-23_18-15-24-924/...
│ └── 2024-04-23_18-15-35-462/...
├── xyz_cycle_log/
│ ├── 2024-04-23_18-15-24-924/...
│ └── 2024-04-23_18-15-35-462/...
├── xyz_nav_stack/
│ ├── rpc/
│ │ └── rpc.20240425-175920.log
│ ├── server/
│ │ └── server.20240425-175920.log
│ ├── NavAssistant/
│ │ └── NavAssistant.20240425-175920.log
│ ├── calibration/
│ │ ├── lidar_lidar_calib.20240425-175920/...
│ │ └── lidar_base_calib.20240425-175920/...
│ ├── nodes/
│ │ ├── mid360/
│ │ │ └── mid360.20240425-175920.log
│ │ ├── localize_in_box/
│ │ │ ├── localize_in_box.20240425-175920.log
│ │ │ └── localize_in_box.20240425-175920/
│ │ │ └── xxx.pcd
│ │ └── fall_detection/
│ │ ├── fall_detection.20240425-175920.log
│ │ └── fall_detection.20240425-175920/
│ │ └── xxx.pcd
│ ├── rerun/
│ │ └── rerun.20241231-160514.rrd
│ └── rosbag/
│ └── xxx.bag
├── xyz_robot_driver_node/
| └── robot_driver_node.xyz-Workstation.xyz.log.INFO.20240612-135828.1097851
├── xyz_mobile_robot_driver_node/
| └── mobile_robot_driver_node.xyz-Workstation.xyz.log.INFO.20240612-134245.1066380
├── xyz_chassis/
| └── controller_node.20240612-134707.37887
├── xyz_video_log/
│ ├── 2024-04-23_18-15-24-924.mpg
│ └── 2024-04-23_18-15-35-462.mpg
└── xyz_last_log/
├── production_log/
│ └── upload_20250208_164347/
│ ├── logs_and_report_info.txt
│ ├── logs_and_report_info.zip
│ └── README.txt
├── collector_log/
│ └── collector.2025-02-08.log
└── system_log/
└── system.2025-02-08.log
从资料网站下载上传的日志时,有如下对应关系:
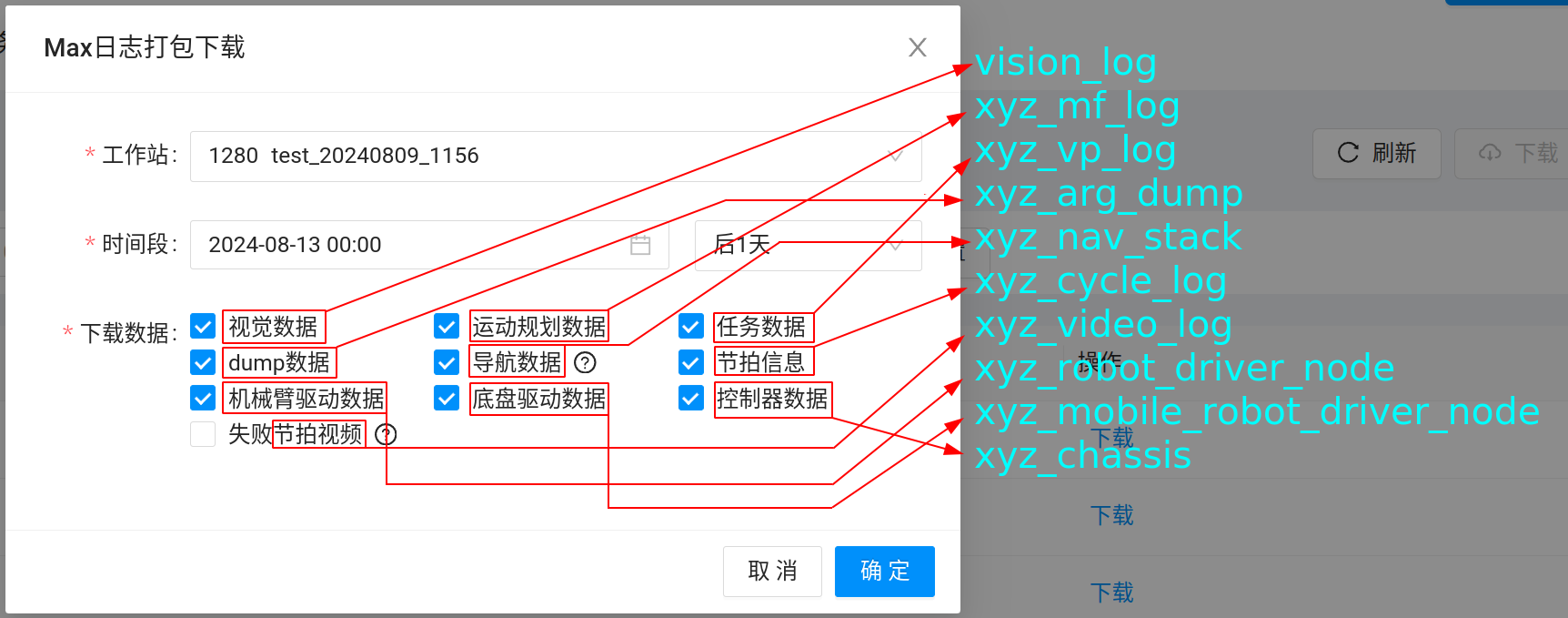
注意
如果在数据上传过程中发现文件格式不符合校验规则,请检查文件目录结构及文件命名规则是否正确,且部分校验规则是在软件迭代过程中陆续加入,软件版本过低也会不符合校验规则,建议升级软件到最新版本。
如果需要上传的文件是一种全新的文件格式,可联系软件开发( kun.chen@xyzrobotics.com )新增校验规则。
如果已上传的日志不支持覆盖,重复上传将会被取消。支持覆盖上传的日志类型有
xyz_cycle_log、xyz_robot_driver_node、xyz_mobile_robot_driver_node、xyz_chassis和视觉日志的record目录。
2. 视觉数据已上传却无法在资料网站中查询到数据?
数据可能上传失败了,手动刷新失败列表,可检查数据是否进入了CSC Max【数据上传】的【失败列表】中
云端数据量较大,还未能及时处理,需要等待片刻
长时间无法查询数据,请联系软件开发( kun.chen@xyzrobotics.com )
3. 上传装卸车日志,无法在资料网站看到
步骤1. 检查软件版本
答:CSC MAX在0.7.0中才开始支持上传MaxLog,如果现场使用的是小于0.7.0版本的CSC Max,会造成上传失败的问题。版本过低,此时通常推荐升级到最新版本
步骤2. 查检【上传列表】的开始/暂停按钮是【全部开始】还是【全部暂停】
答:如果按钮显示【全部开始】说明当前状态是暂停,点击【全部开始】即可开启上传
步骤3. 检查【失败列表】中是否有大量上传失败的MaxLog数据
答:【失败列表】中的数据来自【上传列表】中上传失败的数据。失败列表中会记录上传失败的原因,比如文件格式校验失败、文件超过大小限制等。
步骤4. 检查【上传列表】中的上传数据是否是一直在【上传中】
需要检查网络状况,可能是网络较差导致上传大文件较慢,或者无网络导致日志无法上传
步骤5. 检查在CSC Max中注册的工作站名称
一个项目下可能有多个工作站,可能找错了工作站。CSC Max的头部栏名称构成是【项目名-工作站名-工作站编号】,可按此对照
4. 注册、切换工作站弹窗中不显示项目或工作站列表
检查是否是网络问题,如果网络较差导致项目列表获取失败,可以重新打开注册弹窗
检查是否有足够的权限,联系项目经理,在【资料网站】中的【成员/角色】页面,查看自己角色权限是否包含注册/部署工作站权限
5. 注册按钮为灰色,无法注册工作站
注册工作站时,工作站命名需要一定条件:字母开头,5到30个字符以内的名称(只允许字母、数字和下划线),输入的工作站名称满足条件后,注册按钮会自动变为可点击状态
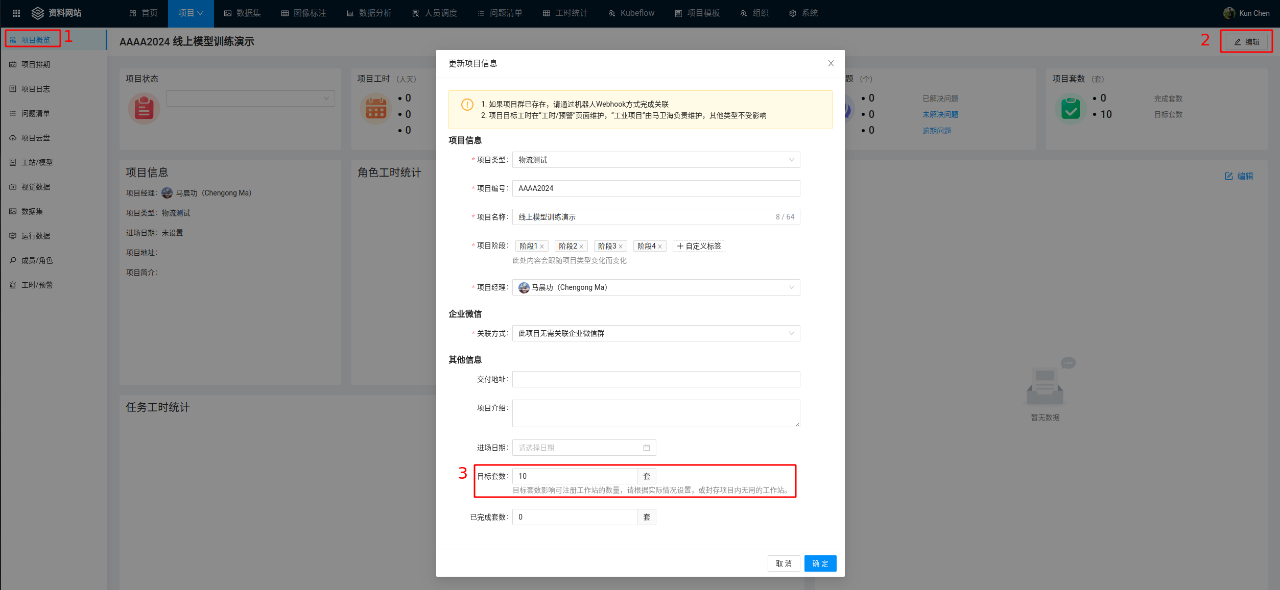
6. 注册工作站时提示工作站数量已达上限
这是因为一个项目下的工作站部署套数有限制,项目负责人可以按需调整套数限额,调整方式为:进入 资料网站 中对应项目的【项目概览】,点击右上角的【编辑】按钮,在编辑弹窗里调整【目标套数】
7. 失败列表中的文件提示文件大小超过限制
这是由于上传的文件超过了预定的大小限制,在0.7.1版本之前,所有的文件上传最大大小不能超过 100M。从0.7.1版本开始,默认文件大小限制为 200M。个别类型的文件格式允许大小超过200M,比如导航日志下的rosbag类型文件。