安装驱动
inovance 机械臂驱动文件列表
机械臂代码可从 MAX 安装目录下的 share/robot_code/inovance 中获得。
└── xyz
├── Data 数据文件夹 (部分文件可能不存在)
│ ├── BreakPoints.jsn
│ ├── GripLoadParam.jsn
│ ├── Labels.jsn
│ ├── MonitorVars.jsn
│ ├── P.pts
│ ├── ToolCoordSysParam.jsn
│ ├── UserCoordSysParam.jsn
│ └── UserDefineWarning.jsn
├── api.pro 机械臂主控用到的 api
├── background.pro 后台程序,用于机械臂主控发送心跳信号,及工控机主控不断发送当前状态
├── lib.pro 数据处理相关函数
├── main.pro 主程序
├── project 项目文件夹 (部分文件可能不存在)
│ ├── Device
│ │ └── Device.dat
│ ├── RealTimeMonitor
│ │ └── monitor.dat
│ ├── Variables
│ │ ├── IRC500-L6D_0A36742D-B012-467C-9D55-B8C7D8A352B7
│ │ │ └── Variables.dat
│ │ ├── IR_SV660N_4EBA2E57-4319-4767-95A2-4389CA3320DB
│ │ │ └── Variables.dat
│ │ ├── IR_SV660N_5FAA612D-EB88-472D-B41B-1FD796152192
│ │ │ └── Variables.dat
│ │ └── IR_SV660N_C6F29084-5D29-4FA5-B678-1FD40E7B395A
│ │ └── Variables.dat
│ └── project.inopro
├── xyz.prj 工程文件
├── xyzCartMoveBasic.pro 座标移动基础模板
├── xyzCartMoveReposition.pro 座标移动二次定位模板
├── xyzConst.pro 常数定义
├── xyzMaster.pro 机械臂主控测试程序
├── xyzMotion.pro 工控机主控程序
├── xyzTrajMoveAsync.pro 轨迹移动异步模板
└── xyzTrajMoveSync.pro 轨迹移动同步模板
设定机械臂 IP
进入
设置->系统设置->通讯设置->连接到控制器, IP 地址为 192.168.23.25, 连接控制器。连接成功后,在真实示教器最上方,切换到管理模式,密码为 “000000”。
进入
设置->系统设置->通讯设置->网络配置,将 ethernet 网口 1 ip 改为 192.168.37.100

inovance 设定机械臂 IP
将 ethernet 网口1连接到工控机上或者交换机上,工控机 ip 设为 192.168.37.101。
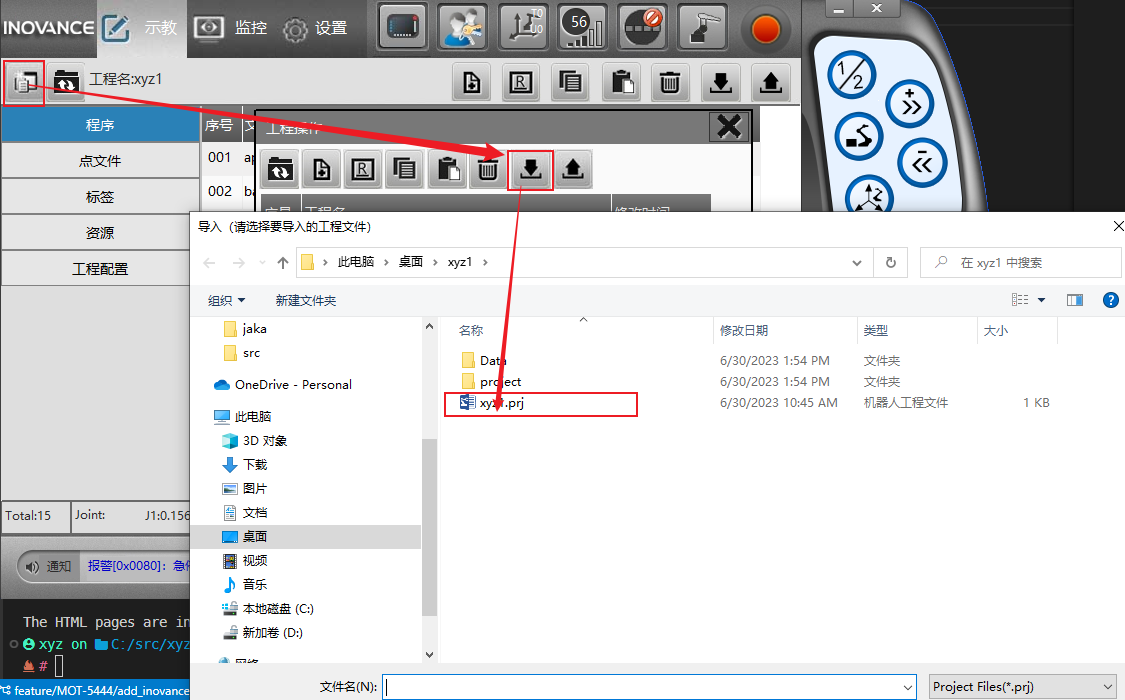
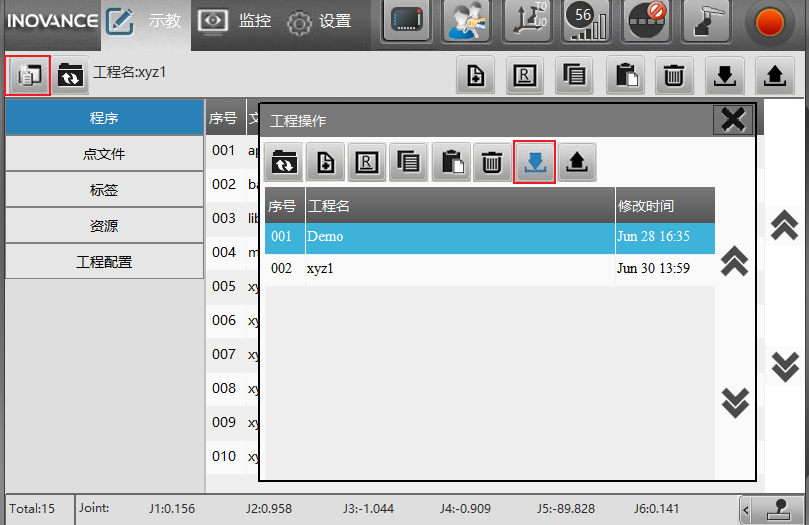
使用 InoRobotLab 导入程序
推荐使用 InoRobotLab 导入、运行程序。示教器导入可能会有问题。
连接前,在示教器
设置->系统设置->通讯设置->连接到控制器断开连接。在汇川官网下载好对应控制器版本的 InoRobotLab, 在
控制器处右键单击,选中属性,配置IP地址为 192.168.37.100,保存连接。
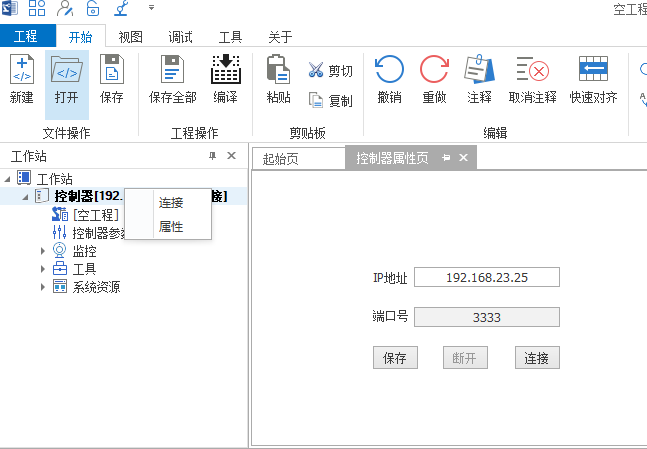
InoRobotLab 连接控制器
进入工程,点击打开本地工程,选择 MAX 安装目录下的 share/robot_code/inovance/xyz中的xyz.prj
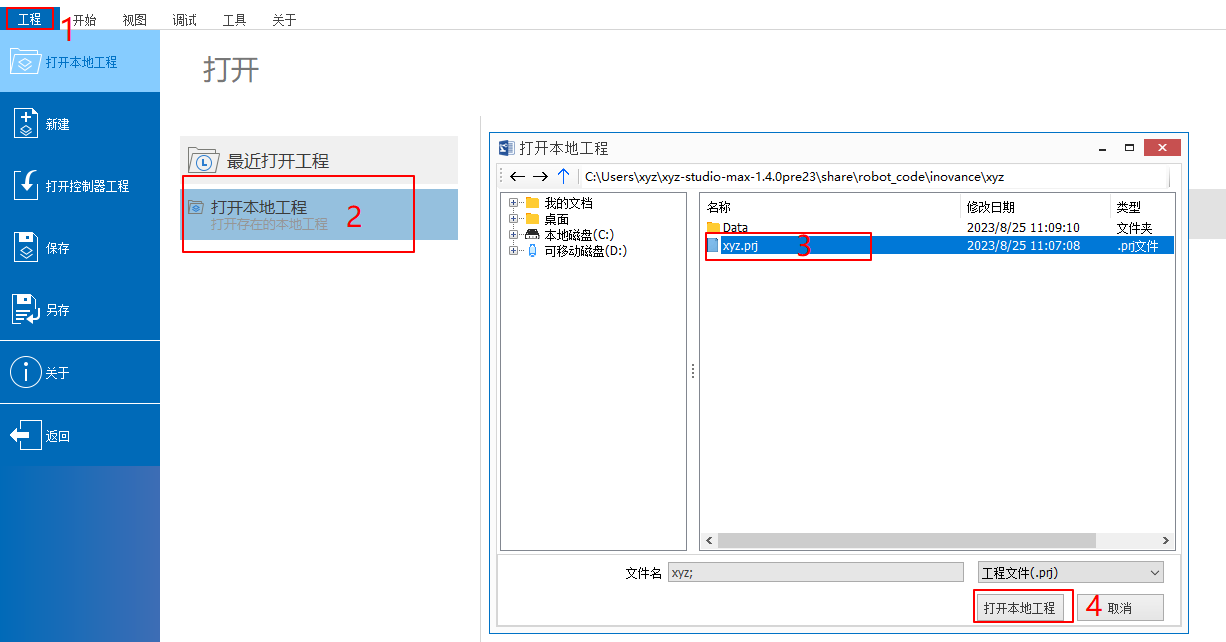
InoRobotLab 导入程序1
进入
调试, 点击同步到控制器。
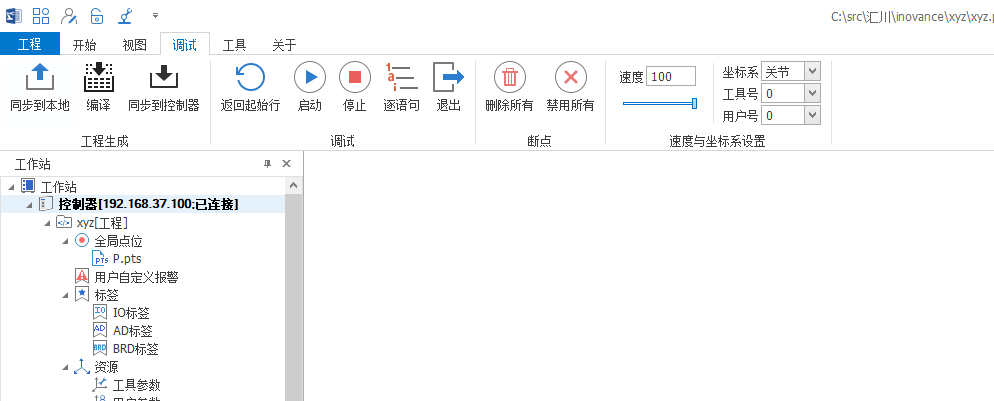
InoRobotLab 导入程序2
注1:在使用 InoRobotLab 导入下位机程序时如果出现乱码报错,则关闭系统的UTF-8再重新启动打开软件查看错误(注意使用Max软件时需要打开UTF-8)
注2:若出现乱码错误或是 程序文件机型匹配错误 或 全局点文件机型匹配错误,可能是汇川机型匹配问题,需要修改机型匹配文件。下载下面文档,按文档操作: