安装驱动
Dobot 机械臂驱动文件列表
- – Master
global.lua (机械臂主控功能接口库)
test_src0.lua
xyz_CartMove_Basic.lua (坐标运动基础应用模板)
xyz_CartMove_Reposition.lua (坐标运动二次定位应用模板)
xyz_TrajMove_ASync.lua (轨迹移动异步模板)
xyz_TrajMove_Sync.lua (轨迹移动同步模板)
- – Motion
motion_src0.lua (工控机主控运动控制程序)
status_src0.lua (工控机主控机械臂状态发送程序)
设定机械臂 IP
DobotStudio Pro 是越疆针对 Dobot 机器人开发的控制软件,软件支持 Windows 和 Android 操作系统,使用 DobotStudio Pro 操作控制 Dobot 机器人非常方便快捷。
安装 DobotStudio Pro
下载 DobotStudio Pro 安装包
可以从 Dobot 官网的下载中心(https://www.dobot.cn/service/download-center)下载最新的 DobotStudio Pro 安装包。 DobotStudio Pro 是免费的,只需要注册一个 Dobot 账号便可以下载,下载中心也有 DobotStudio Pro 用户使用手册,以及其他手册, 可以根据需求下载。
双击打开安装包后,选择安装语言,并单击下一步。

在安装界面中单击一键安装,或在自定义选项中设置安装路径后开始安装。

软件安装成功后在提示界面单击立即体验可以直接打开软件。
连接 Dobot 机器人并修改机器人IP地址
Dobot 控制柜开机过程机械臂五轴上的蓝色灯会一直闪烁,表示控制柜内置 WiFi 路由器在初始化中,LAN 、 WiFi 、示教器均无法连接机器人。等待蓝色灯变常亮时,表示初始化完成。Dobot 机器人控制器支持通过 wifi 和有线连接, 这里我们只说明通过有线连接的方式,无线连接可以查阅 DobotStudio Pro 用户使用手册。
请将网线一端连接至控制柜的 LAN 网口,另一端连接至 PC 或者交换机,然后修改 PC 的 IP 地址,使其与控制柜的 IP 地址在同一网段。
控制柜上 LAN1 网口的默认 IP 为192.168.5.1, LAN2 网口的默认IP为192.168.200.1。 LAN1 网口的 IP 地址可在通讯设置中修改, LAN2 网口的 IP 地址不可修改。
等待机器人初始化完成后,打开 DobotStudio Pro , DobotStudio Pro 启动后会自动搜索同网段的机器人。
等待搜索到机器人后,选择要连接的机器人,然后点击
连接。

连接到机器人后会右侧界面会自动弹出控制界面,可以点击右侧边栏的
控制收回控制界面,然后点击主界面上的菜单->设置弹出设置界面。

点击
通讯设置然后修改 IP 地址和子网掩码,修改完成后点击应用。然后关闭 DobotStudio Pro ,重启机器人控制器便可以完成设置。
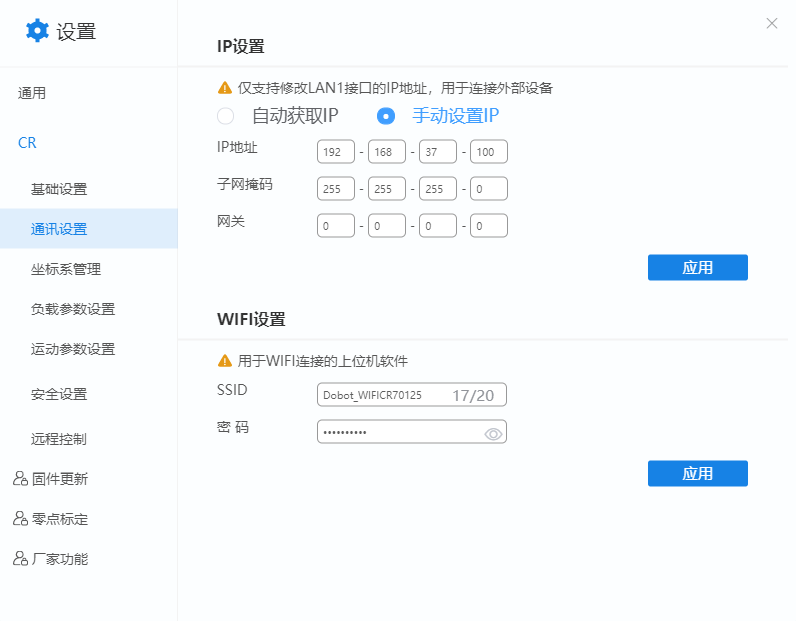
“IP地址”设置为:192.168.37.100
“子网掩码”设置为:255.255.255.0
重启控制器后如果想要在连接机器人,需要设置电脑的 IP 地址和机器人在同一网段。
导入工程
在越疆的脚本编程中,脚本文件的名字是无法被修改,并且在运行程序时如果脚本中有需要执行的代码,那么脚本程序将单独在一个线程中启动运行。 为了更好的区分工控机主控程序和机械臂主控程序,同时又不使脚本文件过于庞大,我们需要先创建两个 DobotStudio Pro 工程,分别时工控机主控工程 和机械臂主控工程。
工控机主控工程
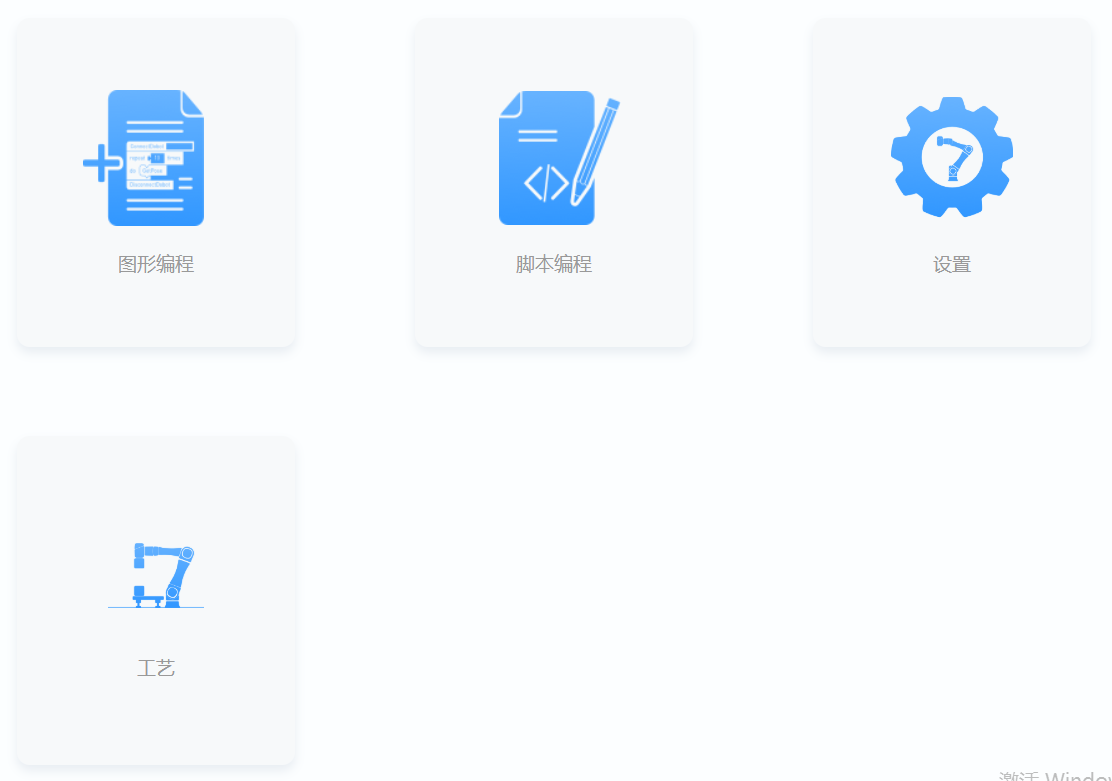
打开 DobotStudio Pro 并和机器人连接成功后,点击主界面上的
脚本编程图标,然后界面会跳转到脚本编程界面。
点击
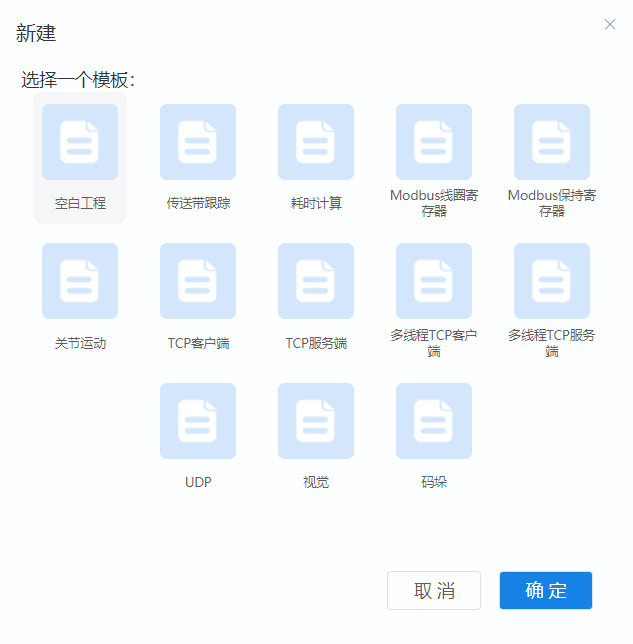
文件->新建,选择空白工程并点击确定。
编辑界面选中
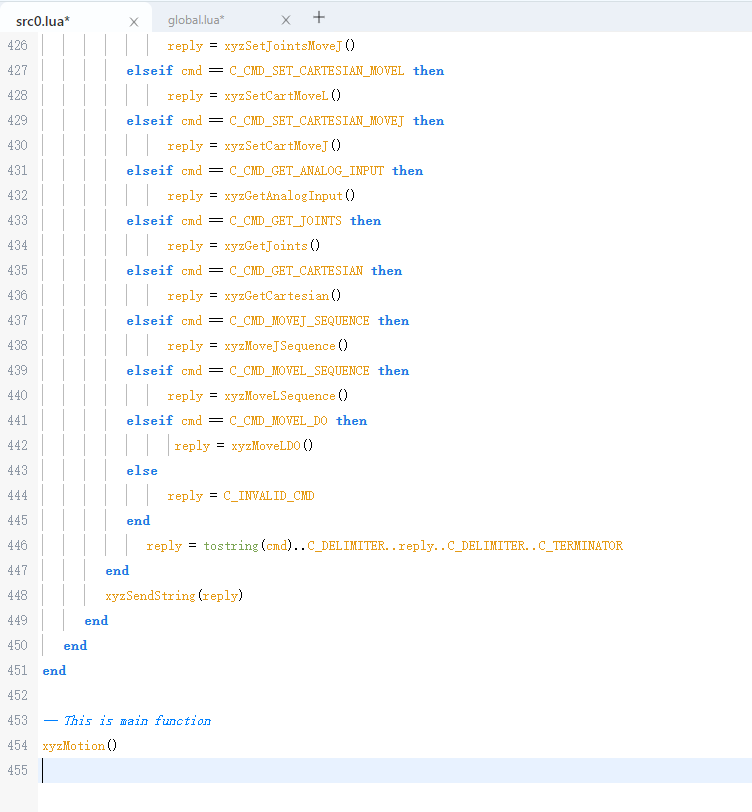
src0.lua,并删掉里面已有的内容。通过文本编辑工具打开 Dobot 驱动文件中的 motion_src0.lua ,并拷贝其中所有内容,复制到
src0.lua中。
复制 motion_src0.lua 里代码的时候,可以先通过快捷键(ctrl+A)全选所有的代码,然后再复制(ctrl+C),这样可以保证所有的代码没有被遗漏。
motion_src0.lua 代码中的 C_MOTION_SERVER_IP 和 C_MOTION_PORT 表示的是工控机的 IP 地址和端口号,如果工控机 IP 地址或者端口变更请修改 C_MOTION_SERVER_IP 和 C_MOTION_PORT
点击编辑界面上的
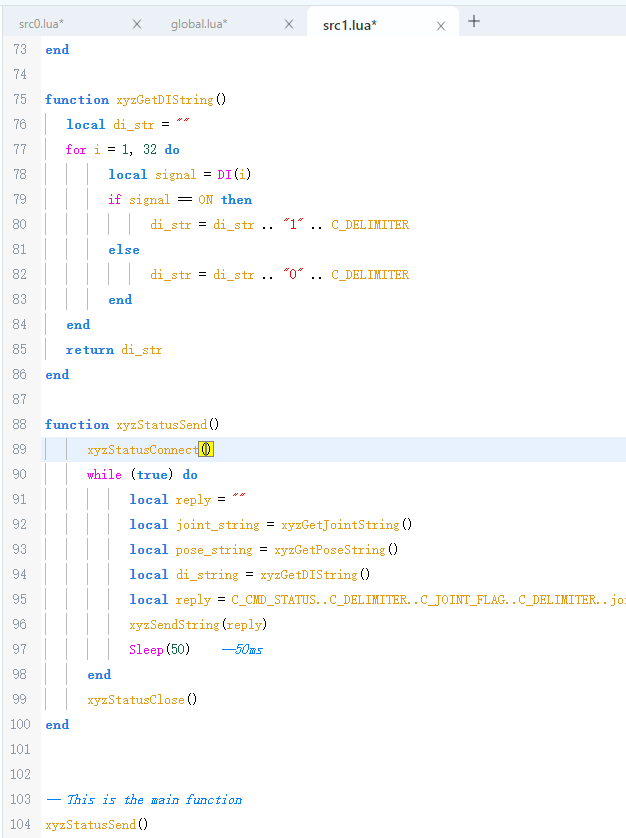
+按钮新增一个脚本,新增的脚本会自动命名为src1.lua,选中src1.lua,并删掉里面的已有内容。

通过文本编辑工具打开 Dobot 驱动文件中的 status_src0.lua ,并拷贝其中所有的内容,并复制到
src1.lua中。
复制 status_src0.lua 里代码的时候,可以先通过快捷键(ctrl+A)全选所有的代码,然后再复制(ctrl+C),这样可以保证所有的代码没有被遗漏。
status_src0.lua 代码中 C_STATUS_SERVER_IP 和 C_STATUS_PORT 表示机械臂的 IP 地址和端口号,如果机械臂 IP 地址或者端口号变更请修改 C_STATUS_SERVER_IP 和 C_STATUS_PORT
点击
保存,在弹出的对话框中输入工程名 “xyz_motion” ,然后点击确定保存工程。
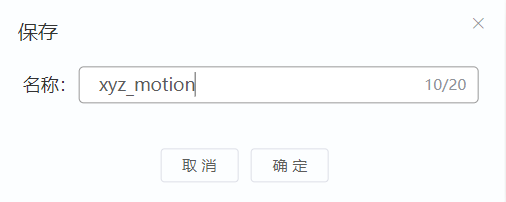
至此工控机主控的工程便创建完成并保存到了 dobot 控制器中。
机械臂主控工程
打开 DobotStudio Pro 并和机器人连接成功后,点击主界面上的
脚本编程图标,然后界面会跳转到脚本编程界面。
如果此时是刚创建完工控机主控工程,可以直接跳转到第二步。
点击
文件->新建,选择空白工程并点击确定。
编辑界面选中
global.lua,并删掉里面已有的内容。通过文本编辑工具打开 Dobot 驱动文件中的 global.lua ,并拷贝其中所有的内容,并复制到
global.lua中。
复制 global.lua 里代码的时候,可以先通过快捷键(ctrl+A)全选所有的代码,然后再复制(ctrl+C),这样可以保证所有的代码没有被遗漏
编辑界面选中
src0.lua,并删掉里面已有的内容。根据项目需求通过文本编辑工具打开 dobot 程序文件夹下的模板程序,并拷贝其中的所有内容,并复制到
src1.lua中。这里以坐标运动基础应用模板(xyz_CartMove_Basic.lua)为例
点击
保存,在弹出的对话框中输入工程名 “xyz_master” ,然后点击确定保存工程。
至此机械臂主控的工程便创建完成并保存到了 dobot 控制器中。