安装驱动
ae 机械臂驱动文件列表
机械臂代码可从 MAX 安装目录下的 share/robot_code/inovance 中获得。
├── xyz_motion.arl 工控机主控程序
├── xyz_master_api.arl 机械臂主控测试程序
├── xyzData.pro 常数定义
├── xyz_status.pro 后台通道任务
设定机械臂 IP
集成商权限登录进示教器后,进入
系统->系统配置->网络配置, 根据网线连接的控制柜的网口进行配置,EtherNet 网口A 对应 用户网口1,EtherNet 网口B对应用户网口2。配置网络如下所示
IP 地址:192.168.37.100
子网掩码:255.25.255.0
网关:192.168.37.1
保存后,重启示教器。
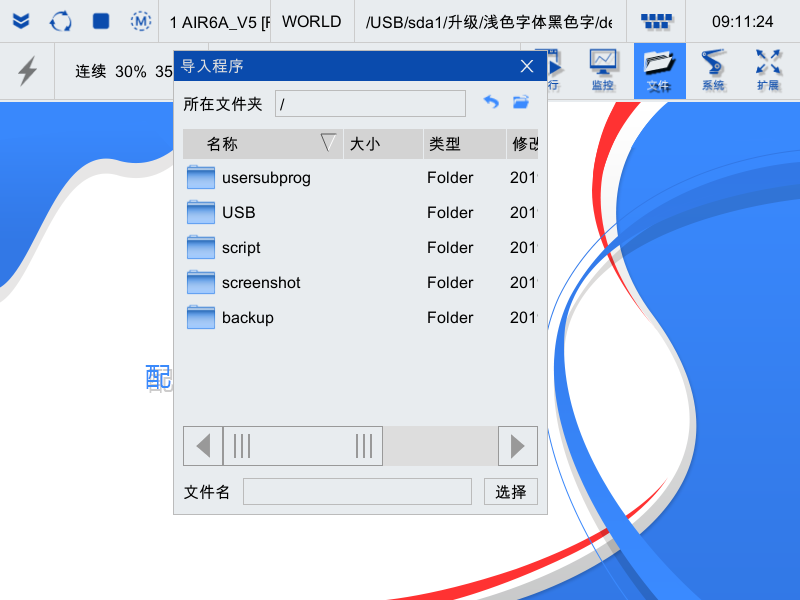
使用 RPsim 导入程序
进入
文件->文件管理, 进入/script/目录, 新建xyz文件夹依次按照 robot_code/ae 中的代码,新建同名文件,将代码复制粘贴到文件中。